In a vehicle FE model, quickly and efficiently set kinematic systems such as seats, steering wheels, and pedals in different positions using the Mechanism browser.
A dummy can then be positioned on the seat and may have its hands placed on the steering wheel and feet on the pedals. To couple a dummy to a seat mechanism the degree of freedom of one or more bodies of the dummy (“child” bodies) must be linked to a body of the seat mechanism (“master” body). The motion of the master body will drive the motion of the child bodies; however, the motion of the master body may be limited by the angle limits of the dummy joints.
| 1. | In the Mechanism browser, right-click on the seat mechanism and select Link to Dummy from the context menu. |
| 2. | In the Dummies dialog, select a dummy to link to the seat mechanism and click Next. |
| 3. | In the Mechanism bodies (Master body) dialog, select the master body from the seat and click Next. |
Note: For this use case, it is common to select the seat cushion.
| 4. | In the Dummy bodies (child bodies) dialog, select the dummy slave bodies and the linked degrees of freedom and click Close. |
Note: For this use case, it is common to link to the lower torso of the dummy in degrees of freedom Tx, Ty, and Tz (selected per default).
| 5. | To fix some of the bodies of the dummy (for example, hands and feet), define constraints on those bodies by selecting Create > Constraint > Point Node or Point Location from the context menu. |
| 6. | Position the seat mechanism. The position of the dummies limbs will be automatically updated. |
Example
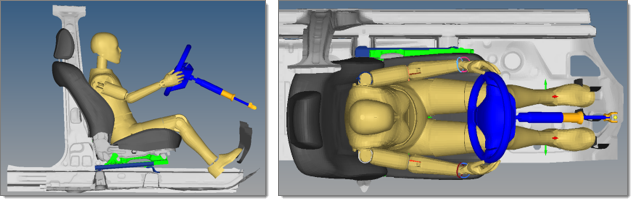
Initial state
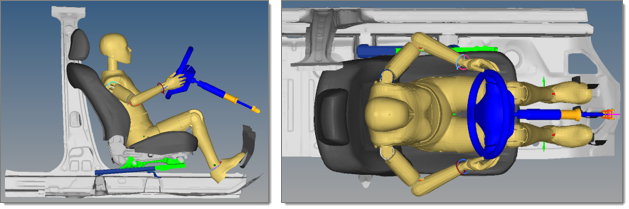
After a translation of 100mm of the seat
See Also:
Mechanism Browser





