|
»Click here to display Table of Contents«
|

3D Contact |

|

|

|

|
|
3D Contact |
|
|

|

|
|
»Click here to display Table of Contents«
|
3D Contact |
|
|
|
|
|
3D Contact |
|
|
|
|
The 3D Contact capabilities in MotionSolve have been completely revamped. In line with these changes MotionView 14.0 has major improvements and features for easy modeling and obtain a robust contact simulation results.
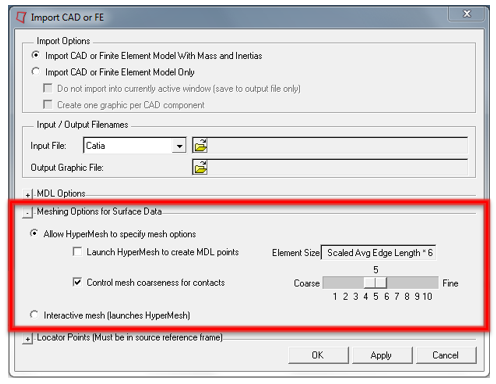
New meshing options are now available when importing CAD geometry. These enable you to control the mesh density in a very intuitive way.
Accurate contact force generation requires uniform meshes. New algorithms, more suited for uniform mesh generation are now used. This new meshing option is only enabled for input geometries and not for FE models.
|
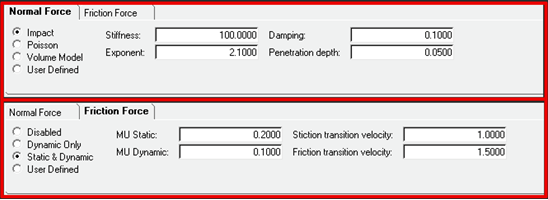
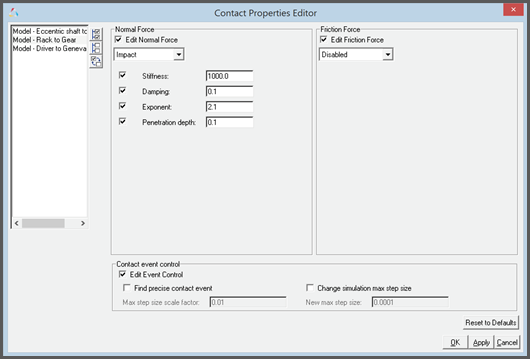
The Properties tab in the Contact panel has been reorganized to have sub-tabs for normal force and friction force.
Reasonable contact and friction parameters are provided as defaults. You do not have to change these unless your contacts have special properties. Parameters are checked for validity as they are entered and the user is alerted to invalid values before the model is run. Output Requests to measure contact forces are automatically created.
|
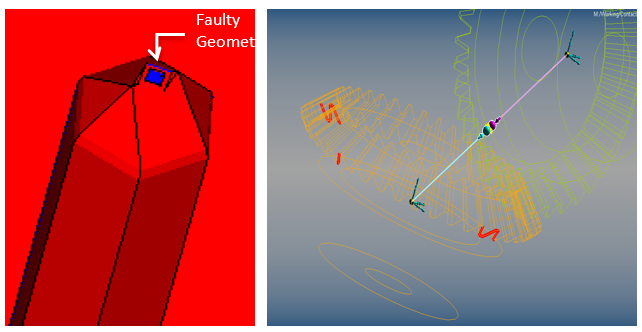
All contact meshes examined and invalid or “dirty” geometry is clearly identified during modeling. Contact surfaces for all meshes can be visualized using “Highlight contact side” option in the Connectivity tab.
Surface normals can be inverted with just one operation. This is especially useful when contact is happening inside a selected closed geometry. Red indicates outward normals and blue indicates the inward normals.
The normals for a mesh are automatically corrected when inconsistencies are detected. This is especially useful when tria-meshes are imported from STL files or Wavefront OBJ files. Open edges and T connections, if any, can be highlighted as shown in the figure on the top right. If the mesh is clean (i.e. it forms a closed volume), the panel indicates “No mesh errors” else the “Highlight mesh errors” option becomes available.
|
MotionView now includes a new mesh manipulation tool that allows you to clean previously unusable meshes for contact solution. The capability is accessed from the Import CAD or FE utility. Import CAD or FE utility now provides additional cleaning options that enable you to fill holes, thicken surfaces, eliminate T-junctions and shrink-wrap unusable meshes. All of this is done with a minimum of user input.
|
A new Volume Model for normal force calculations is now supported. User defined contact models for both normal and friction forces are also supported.
In addition, user-defined normal and friction force definitions are supported.
|
This macro tool has been updated to take into account the new contact properties available in the solver and makes setting properties across multiple contacts quick and intuitive.
|
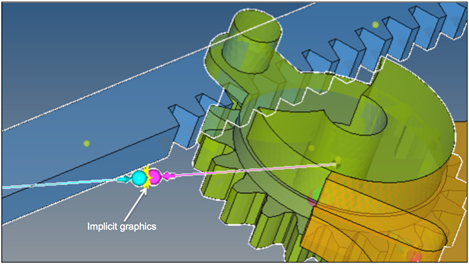
A new “implicit graphics” contact icon is now visible. You can visually see the geometries that have contact connections.
Associated graphics are highlighted when contact entity is selected.
|
Advanced options are available to detect the precise event when contact occurs. An option is also available to change the maximum step size subsequent to contact detection. This option introduces a Sensor entity with a zero crossing attribute into the MotionSolve XML file. This Sensor will control integration step size so that the onset of contact is accurately detected. Refer to Rigid to Rigid Contact section in MotionView User Guide to learn more about modeling contacts.
|
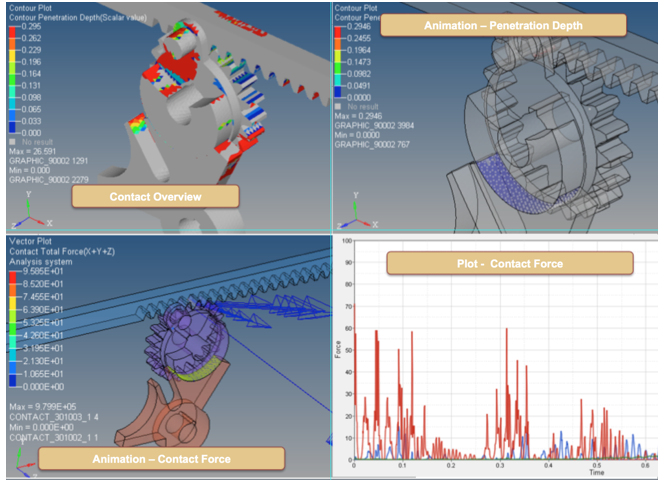
MotionView now has capability to generate a Contact Report automatically to simplify the post processing of contacts. For every model that involves contacts, the auto-generated report contains the necessary plots and animations that enable you to easily understand contact behavior in your model.
|