MotionSolve 14.0 includes a beta release of the “NLFE Body” which allows you to model non-linearly flexible components in your multibody system. The NLFE Body is based on the Absolute Nodal Coordinate Formulation (ANCF). Nonlinearity can occur for two main reasons: (A) Geometric nonlinearity and (B) Material non-linearity. The NLFE body supports both.
A non-linear modeling component is typically required in the following scenarios:
| • | A large deformation is expected in the flexible component, or an unusually large deformation is observed in the flexible component |
| • | Stresses in your flexible components approach yield point of the material |
| • | The flexible component is composed of non-linear hyper elastic materials like rubber or polyurethane. The material exhibits a nonlinear stress vs. strain behavior or is hyper elastic |
| • | A linearly flexible modelling component does not provide the fidelity that is desired |
NLFE subsystems are included in MotionSolve as a flexible body that is specified through an ANCF XML file. The MotionSolve XML file fragment below illustrates this.
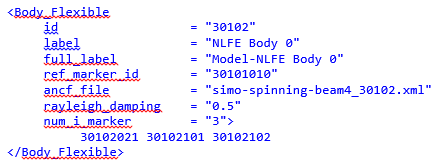
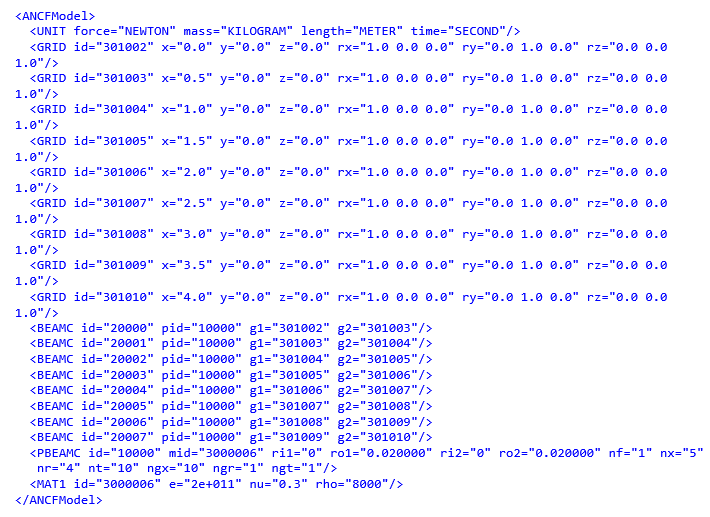
The NLFE subsystem can consist of any combination of atomic MotionSolve NLFE elements. For the example shown above, the NLFE subsystem is specified in the file simo-spinning-beam4_30102.xml. The contents of this file are shown in the table below.
MotionSolve supports a comprehensive set of NLFE modeling elements. The table below summarizes the current implemented atomic NLFE entities in MotionSolve. Note, that MotionView supports only a small subset of these. You can use these in a MotionView model by using a Templex template.
Element Type
|
Supported Element Set
|
Line Elements
|
BEAM9 (Gradient Deficient ANCF Beam Element)
BEAMC (Beam Element with Circular Cross Section)
BEAM12 (Fully Parameterized ANCF Beam)
CABLE (Cable Element)
|
Surface Elements
|
QUAD12 (Rectangular Thick Plate Element)
QUAD9 (Rectangular Thin Plate Element)
TRIA12 (Triangular Thick Plate Element)
TRIA9 (Triangular Thin Plate Element)
|
Solid Elements
|
HEXA12 (C1 Brick Solid Element)
HEXA3 (C0 Brick Solid Element)
PENTA12 (C1 Penta Solid Element)
PENTA3 (C0 Penta Solid Element)
TETRA12 (C1 Tetra Solid Element)
TETRA3 (C0 Tetra Solid Element)
|
Scalar and Bushing Elements
|
ABUSH (Bushing Element)
LINE2 (Two nodes line spring element)
LINE3 (Three nodes line spring element)
LINE4 (Four nodes line spring element)
|
Mass Elements
|
CONGM (Concentrated mass element connection)
CONPM (Concentrated point mass)
|
Connector Elements
|
CONN0 (Connector element)
CONN1 (Connector element)
CONN2 (Connector element)
CONN3 (Connector element)
|
Linear Elastic Material Models
|
MAT1 (Continuum Mechanics Approach )
MAT1LS (Linear Strain Material Model)
MAT6 (Elastic Line Approach)
|
Hyper-Elastic Material Models
|
MAT2 (Incompressible Neo-Hookean Material Model)
MAT3 (Compressible Neo-Hookean Material Model)
MAT4 (Mooney-Rivlin material model)
MAT5 (Yeoh material model)
|
Anisotropic Material Model
|
MAT7 (Thin Plate Element Anisotropic Material Model)
MAT7ORT (Thin Plate Element Orthotropic Material Model)
MAT9 (Anisotropic Material Model)
MAT9ORT (Orthotropic Material Model)
MAT9TRA (Transverse Isotropic Material Model)
|
Geometric Properties
|
PABUSH (Bushing element properties)
PBEAM9 (Arbitrary Cross Section Beam element properties)
PBEAMA (Arbitrary Cross Section Beam element properties)
PBEAMC (Circular beam element properties)
PBEAML (Property card of the ANCF beam elements)
PCABLE (Cable element properties)
PLINE (Line spring property)
PSHELL (Plate elements properties)
PSOLID (Solid elements properties)
|
Other Inputs
|
GRID
UNITS
|
For more information about these elements, you may refer to the NLFE Reference Manual.
MotionSolve also writes out a 3D representation of the BEAM and CABLE elements that can be animated in HyperView. Displacement, stress and strain contours can be visualized on the NLFE body. Other operations such as section cuts can also be applied.
For more details, please refer to the MBS solution release notes. Also, please note that this capability is being offered as a beta or experimental feature and is not expected to be used in a production environment.
|