Highlights
MotionSolve is a state-of-the-art multi-body solver available in HyperWorks. It has a complete set of modeling elements and powerful numerical methods to support a full set of analysis methods. The accuracy, speed and robustness of MotionSolve have been validated through extensive testing with customer models and test data. MotionSolve also offers unmatched compatibility with ADAMS/Solver input.
In version 14.0, MotionSolve had the following major highlights:
| • | Revamped 3D rigid body contact solution that improves robustness, accuracy and performance |
| • | Non-linear finite element bodies are introduced in MotionSolve |
| • | Geometric stiffening support is added for linear flexible bodies |
| • | A new Python Lexicon is available for model building |
| • | Several enhancements to Linear Analysis |
In this version of 14.0.110/210, which is a service update to the 14.0 release, MotionSolve brings continuous improvements to the major functionalities
MotionSolve 14.0 introduced the “NLFE Body” as an experimental feature, which allows you to model non-linearly flexible beams and cables in your multi-body system. The NLFE Body is based on the Absolute Nodal Coordinate Formulation (ANCF). Nonlinearity can occur for two main reasons: (A) Geometric nonlinearity and (B) Material non-linearity. The NLFE body supports both. MotionView also introduced NLFE subsystems to model stabilizer bar, helical spring and belt pulley systems.
This release includes a more robust functionality for the NLFE in MotionSolve. The following improvements have been implemented for this release:
| • | You can now specify the maximum allowable von Mises strain for your NLFE component in the model. This is done by specifying a non-zero value for the attribute “Yield Strain” (YS) in the NLFE material card that can be set in MotionView using the material properties dialog. |
If the maximum von Mises strain in any element of the NLFE component exceeds this value during the simulation, MotionSolve will issue a warning message. MotionSolve monitors the maximum von Mises strain in the NLFE component for BEAM12, BEAMC and CABLE element types for transient and quasi-static analyses.
Specifying the maximum yield strain is helpful for the following scenarios:
| - | You want to control the maximum allowable strain in your component |
| - | You want to keep the deformation in your component within elastic range and know beforehand the elastic yield strain for the material you are modeling |
| - | As a debugging tool when the simulation fails due to excessive deformation in your NLFE component |
| • | Several fixes have been made to enhance the robustness of displacement and stress calculations for BEAM elements subjected to different kinds of loading (axial, bending and torsion) during static, quasi-static and transient analyses. |
| • | MotionView now allows you to define a global method of attaching a marker to an NLFE body for defining joints, forces, bushes etc. This is achieved by defining an environment variable HW_NLFE_CONN_TYPE. You may specify up to six characters that determine how the additional 6 degrees of freedom at the NLFE attachment grid are to be constrained. For example: |
| - | HW_NLFE_CONN_TYPE = TTTTTT implies that the marker is fully clamped to the grid. The grid cannot be subjected to any axial or shear strain. This is the recommended value. |
| - | HW_NLFE_CONN_TYPE = FFFTTT implies that the marker is partially clamped to the grid. The grid can only undergo axial deformations but no shear deformation. |
| - | HW_NLFE_CONN_TYPE = TTTFFF implies that the marker is partially clamped to the grid. The grid can only undergo shear deformations but no axial deformation. |
| - | HW_NLFE_CONN_TYPE = FFFFFF implies that the marker is not clamped to the grid. All deformations are allowed on the grid. |
| - | For more details, please see the documentation on CONN0 in the solver reference manual. |
|
With this release, support for a number of USERSUBs has been added to a number of Lexicon statements such as ARYSUB (ARRAY), STRING_READ (STRING), GRASUB (GRAPHICS), MATRIX_READ (MATRIX), etc.
|
This release introduces support for modal displacement, velocity and acceleration as MotionSolve expressions as well within the data access subroutines SYSFNC and SYSARY.
MotionSolve expression
|
Description
|
Q(f_id, m_id)
|
Modal displacement based on flexbody id f_id and mode id m_id
|
QDOT(f_id, m_id)
|
Modal velocity based on flexbody id f_id and mode id m_id
|
QDDOT(f_id, m_id)
|
Modal acceleration based on flexbody id f_id and mode id m_id
|
SYSFNC subroutine
|
Description
|
c_sysfnc(“Q”,…)
|
Returns modal displacement based on flexbody id and mode id specified in ipar
|
c_sysfnc(“QDOT”,…)
|
Returns modal velocity based on flexbody id and mode id specified in ipar
|
c_sysfnc(“QDDOT”,…)
|
Returns modal acceleration based on flexbody id and mode id specified in ipar
|
SYSARY subroutine
|
Description
|
c_sysary(“Q”,…)
|
Returns modal displacement based on flexbody id and mode id specified in ipar
|
c_sysary(“QDOT”,…)
|
Returns modal velocity based on flexbody id and mode id specified in ipar
|
c_sysary(“QDDOT”,…)
|
Returns modal acceleration based on flexbody id and mode id specified in ipar
|
Note: The support for SYSFNC and SYSARY is also available for the Python version of the subroutine. For more details on usage and syntax, please refer to the Reference Manual.
|
This release adds support for the PRINT action in the Sensor model statement. When the PRINT action is triggered, MotionSolve writes an additional output to the results files at the time the action is triggered.
|
The MFOSUB can now be defined as a Python script in addition to being defined as a FORTRAN/C/C++ compiled user subroutine.
|
MotionSolve will now check if the beam length, Young’s Modulus and/or Shear Modulus are specified as non-positive numbers (which is unrealistic) and will report an error and halt the simulation if these conditions are detected.
|
Powertrain mappings in MotionSolve
Previously, the powertrain CSE function names were not mapped correctly from the ADM/ACF deck to the MotionSolve XML file. With this release, the following names are mapped automatically:
ADM function name
|
XML function name
|
GSEXU977
|
GSEXU
|
GSEYX977
|
GSEYX
|
GSEYU977
|
GSEYU
|
Note: The function name GSEXX977 was being mapped correctly to GSEXX in version 14.0.
Resolved Issues in Linear Analysis
| • | Previously, transfer functions calculated from the A, B, C and D matrices of a model containing a SISO modelling element did not match the transfer function calculated by performing an FFT on the transient results. These two are expected to be the same. This has been identified as a bug and has been fixed with the current release. |
| • | With the previous release, the transfer function calculated between acceleration and force (ACC/F) did not match with the same transfer function calculated in Brand-X. This was identified to be due to the D matrix being calculated incorrectly. This has been fixed with the current release. |
| • | A number of changes have been made to the energy distribution tables that are calculated and written to the screen and results file by MotionSolve. These are listed below: |
| - | The rotational spring damper (RSPDP) element is now included in the energy distribution tables. |
| - | The linear spring damper (SPDP) element displayed entries only in the “X” column of the energy tables. This has been fixed. |
| - | For certain elements, the sum of KE/SE/DE energy in individual directions did not sum up to the value displayed under the total energy column. This has been fixed. |
| - | In certain cases, the total kinetic energy (KE) may be very small (O(10-12)). This small numerical value results in MotionSolve reporting zero kinetic energy (KE) distribution. To avoid this situation, the normalization scheme for the eigenvectors has been modified. Owing to this change, you should expect the total kinetic energy (KE) values to be different whereas the distribution remains the same. |
| - | For a force element (scalar or vector), if the force expression was explicitly defined to be zero in the model, MotionSolve did not write out the corresponding strain and dissipative energy distributions for this element (as they will be zero). With this release, MotionSolve does not exclude such elements from the energy distribution tables. |
| • | In MotionSolve 14.0, the kinetic and strain energy distributions do not match between equivalent model elements (like Force_Bushing and Force_Vector_Twobody, Force_SpringDamper and Force_Scalar_TwoBody) for certain modes in the linear analysis. This has been fixed with the current release. |
| • | Previously, the use of VARVAL while requesting ABCD matrices after a linear analysis yielded incorrect results. This has been fixed within this release. |
|
Previously, the RESTART action caused the solver to restart whenever the sensor criteria is true. This can potentially cause an endless restart if the sensor criteria remains true after the solver restarts. This behavior has been modified such that the solver restarts only when the sensor criteria changes from false to true, thus avoiding the possibility of an endless solver restart.
|
Previously, the strains/stresses reported by MotionSolve for the helical spring created by the MotionView subsystem were discontinuous. This has been fixed starting with the current release.
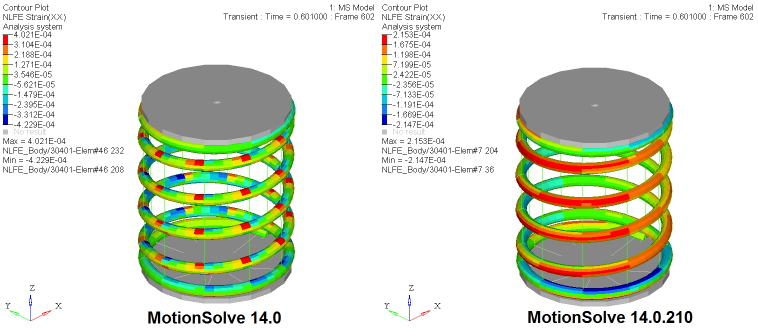
Figure 1: Axial train contours for the same model in MotionSolve v14.0 and v14.0.210.
|






