|
»Click here to display Table of Contents«
|

GET_CONTACT_POST |

|

|

|

|
|
GET_CONTACT_POST |
|
|
|

|
|
»Click here to display Table of Contents«
|
GET_CONTACT_POST |
|
|
|
|
|
GET_CONTACT_POST |
|
|
|
|
Subroutine Type |
Utility/Data Access |
|||||||||||||||||||||||||||
Definition |
Used to extract rigid body contact results. |
|||||||||||||||||||||||||||
Use |
This subroutine can be used to extract rigid body contact results from within the CONTACTPOST subroutine in MotionSolve. |
|||||||||||||||||||||||||||
Calling Syntax |
FortranCALL GET_CONTACT_POST(ID, I_GRA_ID, J_GRA_ID, TYPE, RM, INDEX, RESULT, NRESULTS, ERRFLG)
Cc_get_contact_post(id, i_gra_id, j_gra_id, type, rm, index, result, nresults, errflg)
Python[result, errflg] = py_get_contact_post (id, i_gra_id, j_gra_id, type, rm, index): |
|||||||||||||||||||||||||||
Input Arguments |
[integer] ID |
The ID of the contact force modeling element (Force_Contact in the XML) for which the results are desired. |
||||||||||||||||||||||||||
[integer] I_GRA_ID |
The ID of the I body’s graphic representation. |
|||||||||||||||||||||||||||
[integer] J_GRA_ID |
The ID of the J body’s graphic representation. |
|||||||||||||||||||||||||||
[string] TYPE |
The type of contact result that is requested. Choose from:
All the above quantities are represented in model units, wherever applicable. |
|||||||||||||||||||||||||||
[integer] RM |
The ID of a reference marker that allows you to request for contact states with respect to a frame of reference of your choice. This frame of reference is only applicable to the following types:
|
|||||||||||||||||||||||||||
[integer] INDEX |
There may be several locations where contact occurs between the I and J body at a particular time in the simulation. The INDEX input tells MotionSolve which contact the states are being requested for. The INDEX is a 1-based index and can have a maximum value of what is returned by the utility function GET_NCONTACTS. Thus, 1 <= INDEX <= GET_NCONTACTS(). |
|||||||||||||||||||||||||||
Output Values |
[double] RESULT |
A scalar, vector, or a list of the values returned by GET_CONTACT_POST. |
||||||||||||||||||||||||||
|
[integer] NRESULTS |
The size of RESULT. This is not required while using the Python utility function. |
||||||||||||||||||||||||||
|
[logical] ERRFLG |
A value that is true if an error occurs during the call to GET_CONTACT_POST. |
||||||||||||||||||||||||||
Comments |
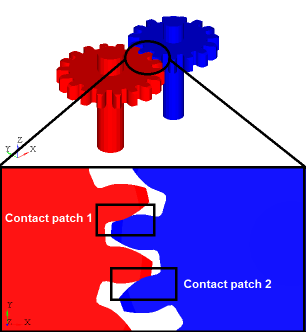
Figure 1 shows two spur gears in contact with each other; two separate contact patches are illustrated.
You may use the type = “INTERSECTION_ID” to keep track of different contact patches at the given time in the simulation. Note: The intersection ID may change across time steps. |
|||||||||||||||||||||||||||
See Also: