|
»Click here to display Table of Contents«
|

/GJOINT |

|

|

|

|
|
/GJOINT |
|
|

|

|
|
»Click here to display Table of Contents«
|
/GJOINT |
|
|
|
|
|
/GJOINT |
|
|
|
|
Block Format Keyword
Description
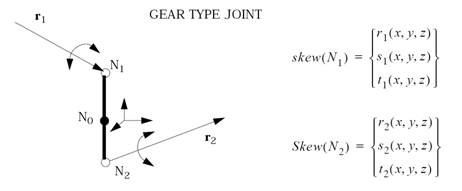
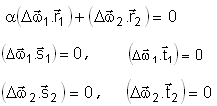
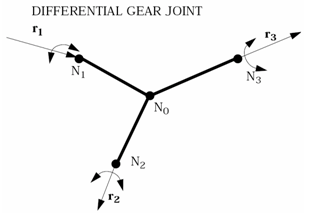
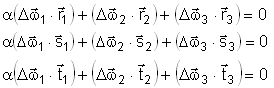
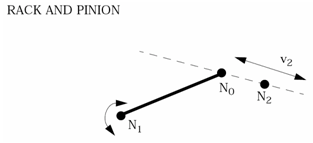
Defines complex (gear-type) joints. This keyword is not available for SPMD computation.
Format
(1) |
(2) |
(3) |
(4) |
(5) |
(6) |
(7) |
(8) |
(9) |
(10) |
/GJOINT/type/joint_ID/unit_ID |
|||||||||
joint_title |
|||||||||
node_ID0 |
FscaleV |
Mass |
Inertia |
node_ID1 |
node_ID2 |
node_ID3 |
|||
Mass1 |
Inertia1 |
r1x |
r1y |
r1z |
|||||
Mass2 |
Inertia2 |
r2x |
r2y |
r2z |
|||||
Mass3 |
Inertia3 |
r3x |
r3y |
r3z |
|||||
|
|
where,
|