|
»Click here to display Table of Contents«
|

Mate |

|

|

|

|
|
Mate |
|
|
|

|
|
»Click here to display Table of Contents«
|
Mate |
|
|
|
|
|
Mate |
|
|
|
|
Model ElementClass NameMate Description |
|||||||||||||||||||||||||||||||||||||
Mate is used to specify general mating constraints between geometric primitives. Mate differs from JOINT and JPRIM in that it specifies more general constraints based on distance, tangency, and coincidence relations between mating geometries. |
|||||||||||||||||||||||||||||||||||||
Attribute Summary
*Type ("COI_POI_CYL", "COI_POI_SPH", "COI_POI_LIN", "COI_POI_POI", "COI_POI_CON", "COI_LIN_LIN", "COI_LIN_CYL", "COI_LIN_PLA", "DIS_POI_POI", "DIS_POI_SPH", "DIS_POI_LIN", "DIS_POI_CYL", "DIS_SPH_SPH", "DIS_SPH_LIN", "DIS_SPH_CYL", "DIS_SPH_CON", "DIS_SPH_PLA", "DIS_LIN_LIN", "DIS_LIN_CYL", "DIS_LIN_PLA", "DIS_CYL_CYL", "DIS_PLA_CON", "DIS_PLA_CYL", "TAN_SPH_LIN", "TAN_SPH_CYL", "TAN_SPH_PLA", "TAN_SPH_CON", "TAN_SPH_SPH", "TAN_LIN_CYL", "TAN_CYL_CYL", "TAN_PLA_CYL", "TAN_PLA_CON") Usage |
|||||||||||||||||||||||||||||||||||||
Mate (i=objMarker, j=objMarker, type=string, optional_attributes) |
|||||||||||||||||||||||||||||||||||||
Attribute Description |
|||||||||||||||||||||||||||||||||||||
i |
Reference to an existing Marker Specifies a marker that defines the connection on the first part. The part may be a rigid, a flexible, or a point mass. This parameter is mandatory. |
||||||||||||||||||||||||||||||||||||
j |
Reference to an existing Marker Specifies a marker that defines the connection on the second part. The part may be a rigid, a flexible, or a point mass. This parameter is mandatory. |
||||||||||||||||||||||||||||||||||||
type |
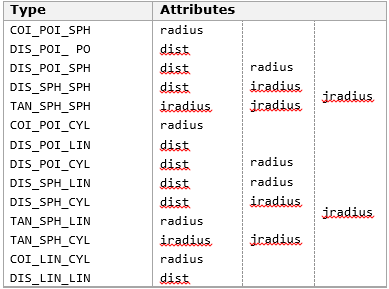
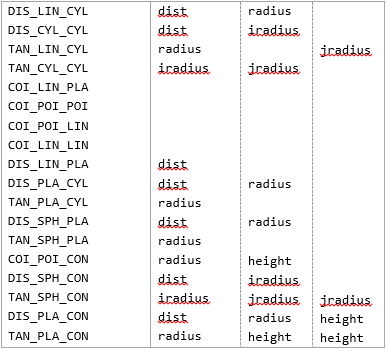
Specifies the type of mate between I and J. This parameter is mandatory. The table below shows the different types of MATES and the number of degrees of freedom removed.
|
||||||||||||||||||||||||||||||||||||
id |
Integer Specifies the element identification number. This number must be unique among all the MATE objects in the model. This attribute is optional. MotionSolve will automatically create an ID when one is not specified. Range of values: id > 0 |
||||||||||||||||||||||||||||||||||||
label |
String Specifies the name of the MATE object. This attribute is optional. When not specified, MotionSolve will create a label for you. |
||||||||||||||||||||||||||||||||||||
radius |
Double Radius of the circle/sphere specified in the mate constraint. This attribute is mandatory for some MATEs, and unnecessary for others. See Comment 1 for more information. |
||||||||||||||||||||||||||||||||||||
iradius |
Double Radius of the I part circle/sphere specified in the mate constraint. This attribute is mandatory for some MATEs, and unnecessary for others. See Comment 1 for more information. |
||||||||||||||||||||||||||||||||||||
jradius |
Double Radius of the J part circle/sphere specified in the mate constraint. This attribute is mandatory for some MATEs, and unnecessary for others. See Comment 1 for more information. |
||||||||||||||||||||||||||||||||||||
dist |
Double Distance between the two parts constrained by the DIS. This attribute is mandatory for some MATEs, and unnecessary for others. See Comment 1 for more information. |
||||||||||||||||||||||||||||||||||||
height |
Double Height of the part specified in the mate constraint. This attribute is mandatory for some MATEs, and unnecessary for others. See Comment 1 for more information. |
||||||||||||||||||||||||||||||||||||
active |
Bool Select one from True or False.
The attribute active is optional. When not specified, active defaults to True |
||||||||||||||||||||||||||||||||||||
Comments
|
|||||||||||||||||||||||||||||||||||||
Examples
|
|||||||||||||||||||||||||||||||||||||
TanPlaCon = Mate (label="Mate1", i=imark, j=jmark, type=”TAN_PLA_CON”, radius=600, height=800) |
|||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||
TanPlaCyl = Mate (label="Mate2", i=imark, j=jmark, type=”TAN_PLA_CYL”) TanPlaCyl.radius=0.035 |
|||||||||||||||||||||||||||||||||||||