|
»Click here to display Table of Contents«
|

RBODY |

|

|

|

|
|
RBODY |
|
|

|

|
|
»Click here to display Table of Contents«
|
RBODY |
|
|
|
|
|
RBODY |
|
|
|
|
Bulk Data Entry
RBODY – Rigid Body Definition
Description
Defines a rigid body as a set of elements, grid points.
Format
(1) |
(2) |
(3) |
(4) |
(5) |
(6) |
(7) |
(8) |
(9) |
(10) |
RBODY |
BID |
REFG |
|
|
|
|
|
|
|
|
TYPE |
ID1 |
ID2 |
ID3 |
ID4 |
ID5 |
ID6 |
ID7 |
|
|
|
ID8 |
… |
|
|
|
|
|
|
|
TYPE |
ID1 |
ID2 |
ID3 |
ID4 |
ID5 |
ID6 |
ID7 |
|
|
|
ID8 |
… |
|
|
|
|
|
|
|
MASS |
M |
|
|
|
|
|
|
|
|
INERTIA |
IXX |
IXY |
IYY |
IXZ |
IYZ |
IZZ |
CID |
|
|
COG |
X |
Y |
Z |
|
|
|
|
|
|
|
Field |
Contents |
BID |
Body identification number. No default (Integer > 0) |
REFG |
Reference grid. See Comment 6. Default = <COG> (Integer > 0). |
TYPE |
Flag indicating that the following list of IDs refer to entities of this type. No default (GRDSET, ELMSET, or SURF) |
ID# |
Identification numbers of entities of the preceding TYPE flag. No default (Integer > 0) |
MASS |
Flag to overwrite the finite element mass of the body. Indicates that a mass value is to follow. |
M |
Mass. (Real > 0.0) |
INERTIA |
Flag to overwrite the finite element inertia of the body. Indicates that the inertia properties are to follow. |
IXX,IYY,IZZ, |
Moments of inertia. For IXX, IYY, IZZ Real > 0.0 For IXY, IXZ, IYZ Real |
CID |
Coordinate system identification number to define the orientation of the inertia tensor. A CID of zero or blank references the basic coordinate system. (Integer > 0 or blank) |
COG |
Flag to overwrite the finite element center of gravity of the body. Indicates that the center of gravity information is to follow. |
X, Y, Z |
Location of the center of gravity. (Real) |
| 1. | At least one Grid Set (GRDSET), Element Set (ELMSET), or Surface (SURF) should be specified. |
| 2. | All elements, grid points, and/or surfaces defined on a RBODY bulk data entry represent one rigid body. The mass and inertia properties are defined by the finite element and mass properties unless they are overwritten by the mass (MASS) and inertia (INERTIA) properties specified on the continuation lines. If mass is not defined on RBODY, then the total mass of the model is the same whether the RBODY is utilized or not. If the mass value is defined on the RBODY, and if the RBODY completely references the specified elements (Figure A), then the mass of those elements will be zeroed out and their mass will then be sourced from the RBODY. The mass from the RBODY is represented using the CONM2 entry. |
In some cases (TYPE=GRDSET), all the grids corresponding to a particular element may not be included in the RBODY definition (Figure B). For such situations, the mass of such partially referenced elements are added to the mass defined for the RBODY.
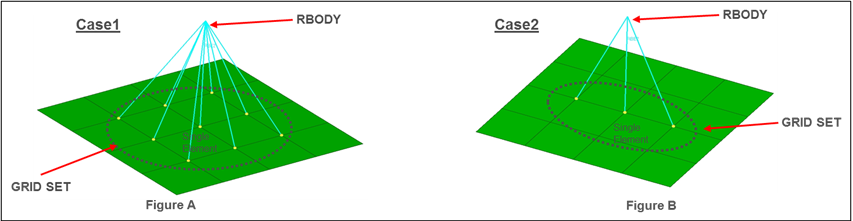
Figure 1: Figure A has completely referenced elements. Figure B has partially referenced elements.
| 3. | The mass, inertia and center of gravity input are optional if element/grid/surface information is provided in the RBODY definition. |
| 4. | If just the principal inertia is specified, IXX, IYY, and IZZ must be positive non-zero values and they must satisfy the condition: the sum of two inertia values must be greater than the third (IXX + IYY > IZZ, IYY+IZZ > IXX, IZZ+IXX > IYY). |
| 5. | Multiple RBODY entries with the same BID can be referenced on the RBODY I/O Options Entry. This allows selection of multiple RBODY’s which can move independently of one another. |
| 6. | If MASS continuation line is specified, then either REFG or COG should be present. If MASS continuation line is not input, and both REFG and COG are not specified, the respective center of gravity of the element/grid/surface selections is used. |
See Also: