|
»Click here to display Table of Contents«
|

YAW |

|

|

|

|
|
YAW |
|
|
|

|
Format |
|||||||
YAW(I, J) |
|||||||
Description |
|||||||
The YAW function computes the first angle, in radians, of a body-3 Yaw-Pitch-Roll rotation sequence. Given two coordinate systems, I and J which are initially having the same orientation, this rotation sequence is defined as follows:
The first argument, marker I, must be specified. The second argument, marker J, is optional. |
|||||||
Example |
|||||||
<Post_Request comment = "Vehicle Orientation (degrees)" id = "70000256" type = "EXPRESSION" expr1 = "NULL" expr2 = "YAW(30301010,30101010)*RTOD" expr3 = "PITCH(30301010,30101010)*RTOD" expr4 = "ROLL(30301010,30101010)*RTOD" /> |
|||||||
Arguments |
|||||||
I |
The marker whose rotational displacement is to be computed. |
||||||
J |
The marker with respect to which the rotational displacement is to be computed. This argument is optional. If omitted, it defaults to the ground coordinate system. |
||||||
Comments |
|||||||
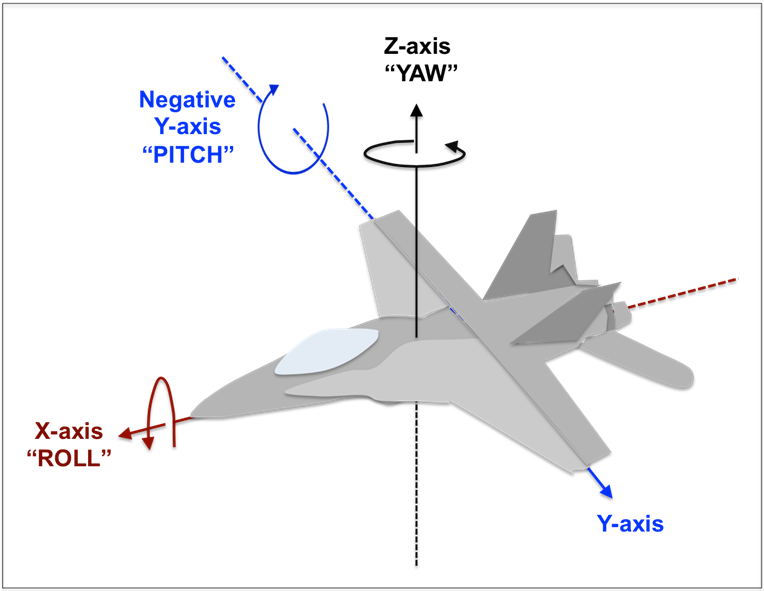
The figure below shows the physical meaning of the Yaw-Pitch-Roll rotation sequence.
|
|||||||