|
»Click here to display Table of Contents«
|

Constant Radius |

|

|

|

|
|
Constant Radius |
|
|

|

|
|
»Click here to display Table of Contents«
|
Constant Radius |
|
|
|
|
|
Constant Radius |
|
|
|
|
A Constant radius event simulates a vehicle driving in a circular path. The Constant radius event maintains a constant turn radius and varies the vehicle velocity to produce increasing amounts of lateral acceleration. Steering and torque controllers maintain the path and the speed of the vehicle through the event. A plot template is available to plot the results. The Constant radius event is used to characterize the roll and understeer characteristics of a vehicle.
The event can be run in Lateral Acceleration control mode or in Velocity control mode. In Lateral Acceleration control mode, the vehicle is driven at a constant speed around the circular track, which results in a constant lateral acceleration.
In Velocity control mode, the vehicle is driven at an increasing speed around the circular path, which results in an increase in Lateral Acceleration. Using the event Form, you can control the driving time, constant radius, and end speed.
Constant Radius Event
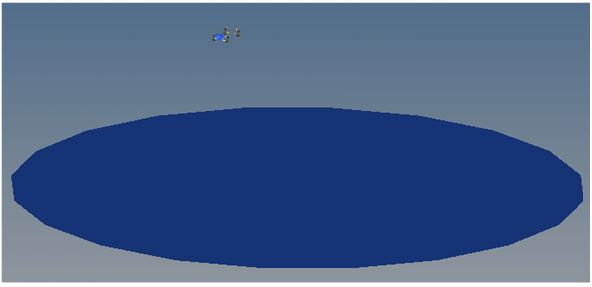
Top View of a Constant Radius Path
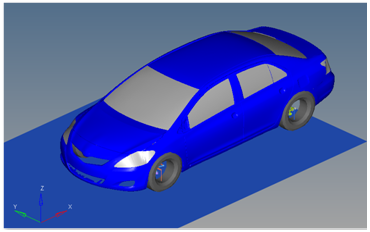
Vehicle Model with Body Graphics
The Constant radius event is designed to work with a full vehicle model that has been built through the MotionView Assembly Wizard. The event should attach to the model automatically when added through the Task Wizard. The event can be used with models built manually, as long as the attachment scheme in the event is strictly followed.
The event is designed to drive a vehicle on a constant radius at either a constant lateral acceleration or at a steadily increasing speed. The event begins with a straight section of road that allows the vehicle to come to steady state. The vehicle enters the turn and the controllers maintain the desired velocity or lateral acceleration.
If Lateral Acceleration is selected for the vehicle control, the event is run at a steady state lateral acceleration. A target lateral acceleration and the radius of the track are entered in the Form. The vehicle initial speed is calculated using the equation v=sqrt(r*a). The equation is embedded in the Form.
The event sequence is described in the table below:
Event Step |
Description |
|---|---|
Start |
Vehicle begins driving in a straight line towards the constant radius circle tangent at the speed that will generate a Lateral Acceleration that was entered in the Form. |
Turn into Constant Radius Track |
Vehicle enters the constant radius track. Turn direction is determined from the Form entry (left or right). Steering is controlled by the Steer controller. Speed is maintained by the Drive torque controller. Lateral Acceleration should be constant (because speed is constant). |
Follow the Constant Radius |
The vehicle follows the Constant radius path for the time defined in the event. |
End of Event |
The event ends when the Time in circular track time is met. |
A series of Lateral Acceleration control events is typically run to characterize the vehicle. A series would include left and right turns (to understand the symmetry of the vehicle) and a sweep of lateral accelerations to characterize the behavior of the vehicle as acceleration increases. The track radius should match the radius of the test track being used to generate correlation data.
When the vehicle control is Velocity, the vehicle drives around the track at a steadily increasing speed and as a result, an increasing Lateral Acceleration. This event provides a sweep of the lateral acceleration behavior of the vehicle (at increasing speeds). Left and right turn directions can be run and the time in the circle can be varied to provide a slower acceleration. The vehicle makes multiple loops around the circle if there is enough time. The event sequence is shown in the table below.
Event Step |
Description |
|---|---|
Start |
The vehicle drives toward the tangent of the Constant radius path. The initial speed is determined from the Circle Radius and the desired initial Lateral Acceleration. Low accelerations result in lower initial speeds. |
Turn into Constant Radius Path |
The vehicle turns into the Constant radius path and begins to accelerate. |
Follow Constant Radius Path |
The vehicle drives along the Constant radius path and increases speed. The vehicle speed is increased from the initial speed to the final speed in the Time in circular track time. Use a longer time to minimize acceleration effects on the results. |
Event End |
The event ends after the Time in circular track time is complete. |
If the model cannot maintain the circular path, the error Could not Find Ideal SWA in 20 Iterations is sent to the log file. This is a generic error that indicates the path is not being followed. It can be caused by a wide variety of issues with the model and the tires. Examine the model results at the time prior to the error being displayed to understand what the vehicle may be doing.
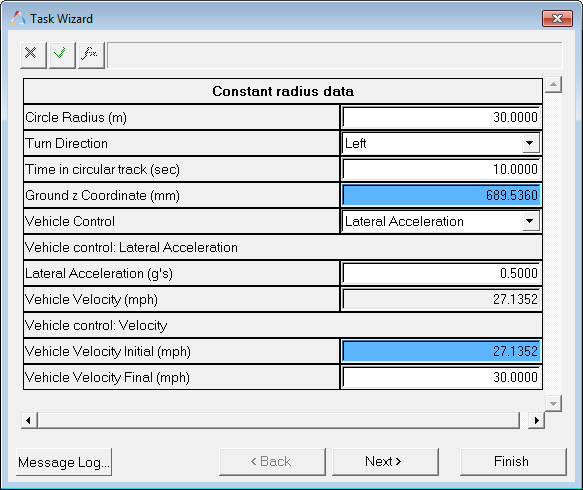
Constant Radius Data Dialog
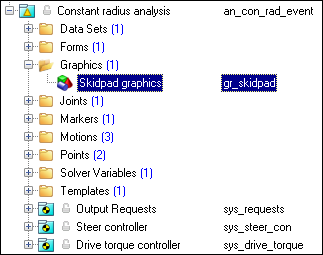
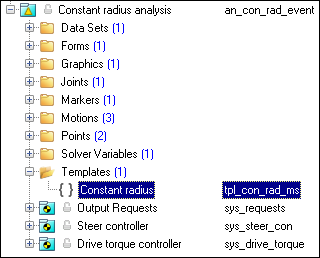
The entities in the event are displayed in the MotionView Project Browser as shown in the image below:
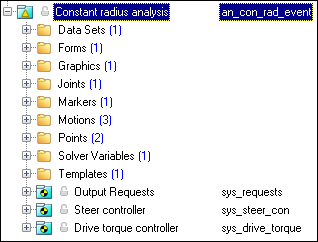
Project Browser View - Constant Radius Analysis
Nine types of modeling element containers are used to define the event (see below). Three sub-systems (Output Requests, a Steer controller, and a Drive torque controller) are also included in the event.
The event uses the standard event attachment. The attachments resolve automatically if the model is built through the Model Wizard. The attachments contain the minimum data the event needs to run the analysis. The attachments are standard for most events.
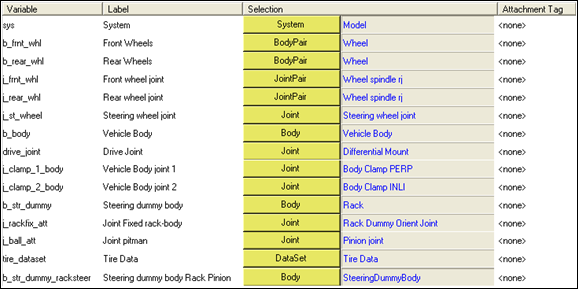
Constant Radius Event – Attachments |
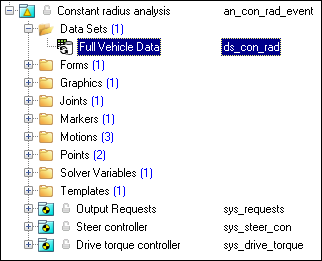
One dataset is used in the system and it contains the data used to describe the Constant radius event. The event allows you to set the Vehicle Control, Lateral Acceleration, final Vehicle Velocity, Time in the circular track, Circle Radius and Turn Direction (left or right). The Vehicle Velocity, wheel rotational velocities and ground height are calculated values and should not be changed.
Project Browser View - Datasets - Constant Radius Analysis
Dataset Property Data Dialog - Constant Radius Analysis |
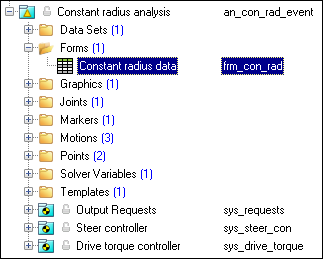
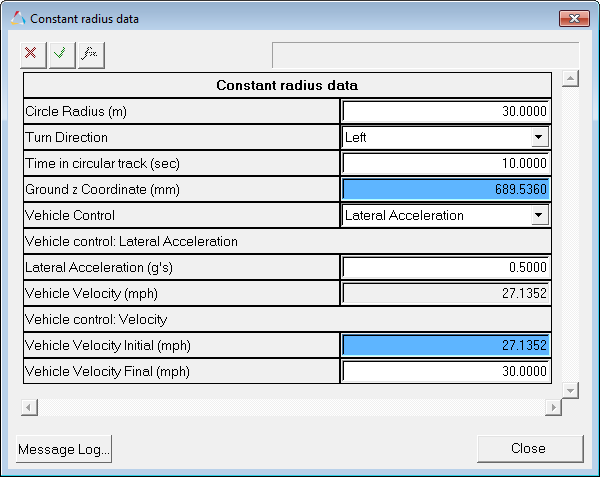
The Form is the only place that you should change the lane change event. Circle Radius, Turn Direction, Time in the circular track, Vehicle Control, Lateral Acceleration and final Vehicle Velocity are the parameters that can be changed. The Ground z Coordinate and initial Vehicle Velocity are calculated values. The Ground z Coordinate is calculated using the wheel CG Z location and the tire rolling radius from the Tire Data.
Project Browser View - Forms - Constant Radius Analysis
Constant Radius Data Analysis - Form Dialog |
One graphic is defined in the event. The graphics define the road surface graphics and should not require any user input. A full description of the graphics can be found here. Skidpad graphics are included to illustrate the path being driven, and are defined parametrically using the data in the Constant radius Form. Skidpad graphics should never require editing unless the event is being fundamentally changed.
Project Browser View - Graphics - Constant Radius Analysis
Skidpad Graphics |
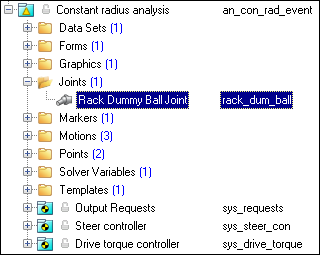
A ball joint is included in the Constant radius event. The joint attaches a dummy body to the steering rack. The joint is included to make certain events work in ADAMS. Attach the dummy body to the steering rack if building a model manually.
Project Browser View - Joints - Constant Radius Analysis
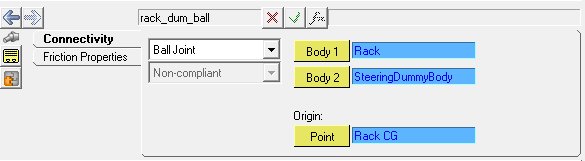
Joints Panel - Constant Radius Analysis |
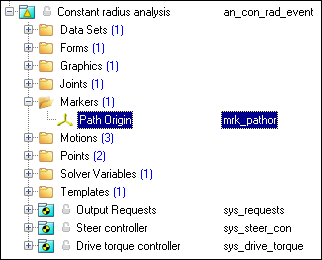
One marker is included in the Constant radius event. The path origin is the origin of skidpad graphics and is parametrically defined to be the CG of the vehicle body. The markers refer to points, and the points contain the parametric logic.
Project Browser View - Markers - Constant Radius Analysis |
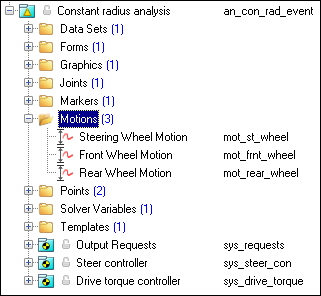
Three motions are included in the event. The steering motion to the vehicle is provided by the Steer controller and acts on a revolute joint that connects the steering column to the vehicle body. If a steering column is not included in the model, the joint acts between the steering rack input shaft and the vehicle body. The Front and Rear Wheel Motions act on the wheel spindle revolute joints that connect the wheel hub to the knuckle. The motion is initially zero (fixing the wheels to the knuckle) so the model converges statically. The motions are deactivated after the static equilibrium analysis to allow the tires to rotate.
Project Browser View - Motions - Constant Radius Analysis |
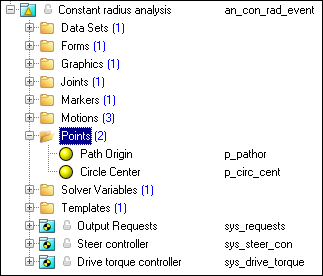
Two points are defined in the event. All points are used to create the skidpad graphics. The points contain parametric logic to define their X, Y, and Z locations. You should not need to modify any points.
Project Browser View - Points - Constant Radius Analysis |
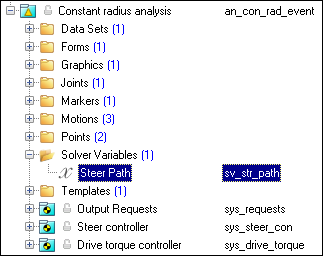
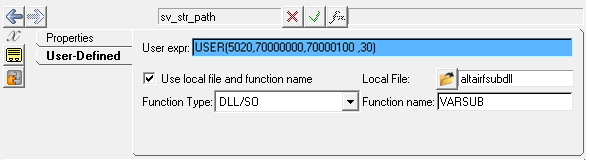
The Constant radius event consists of only one solver variable, the Steer Path Variable, which calls a user subroutine to apply an input at the steering wheel in order to follow a desired path.
Project Browser View - Solver Variables - Constant Radius Analysis
Solver Variable Panel - Steer Path Variable The numbers in the solver variable USER subroutine call are as follows:
|
A template is included in the Constant radius event task. The template is solver specific, and only the MotionSolve template is documented. The template is inserted in the solver deck after the </Model> command and controls the execution of the event.
Project Browser View - Templates - Constant Radius Analysis The template for this event is shown below:
|
ISO +4138-2004 - Passenger cars — Steady-state circular driving behavior — Open-loop test methods.