|
»Click here to display Table of Contents«
|

Driver Demand File (DDF) |

|

|

|

|
|
Driver Demand File (DDF) |
|
|
|

|
|
»Click here to display Table of Contents«
|
Driver Demand File (DDF) |
|
|
|
|
|
Driver Demand File (DDF) |
|
|
|
|
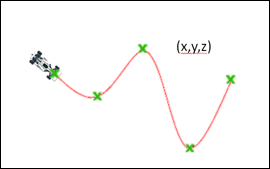
You can define the driver path as a table of centerline points in Cartesian coordinates. Driver uses the AKIMA interpolation scheme to interpolate between the nodes.
[ALTAIR_HEADER]
FILE_TYPE = 'DDF'
FILE_VERSION = 1.0
FILE_FORMAT = 'ASCII'
[UNITS]
(BASE)
{length force angle mass time}
'm' 'newton' 'degrees' 'kg' 'sec'
[DEMAND_VECTORS]
{X Y Z}
2.1000 0.0000 0.0000
1.1000 0.1050 0.0000
0.1001 0.2200 0.0000
-0.8995 0.3451 0.0000
-1.8989 0.4803 0.0000
-2.8979 0.6256 0.0000
-3.8964 0.7810 0.0000
-4.8942 0.9466 0.0000
-5.8913 1.1224 0.0000
-6.8876 1.3084 0.0000
-7.8830 1.5046 0.0000
-8.8773 1.7111 0.0000
-9.8705 1.9278 0.0000
-10.8624 2.1549 0.0000
-11.8530 2.3922 0.0000
Defining acceleration or velocity profile in a DDF.
Example:
[DEMAND_ACC]
TYPE = 'CURVE'
FILE = 'xyz_demand_acc_fo8.ddf'
DEMAND_VECTOR = 'DEMAND_ACC'
[DEMAND_VECTORS]
{X Y Z DA}
0 0 0 3
-1 0 0 3
-2 0 0 3
-3 0 0 3
-4 0 0 3
-5 0 0 3
-6 0 0 3
-7 0 0 3
-8 0 0 3
-9 0 0 3
-10 0 0 3
-11 0 0 3
-12 0 0 3
-13 0 0 3
-14 0 0 3
-15 0 0 3