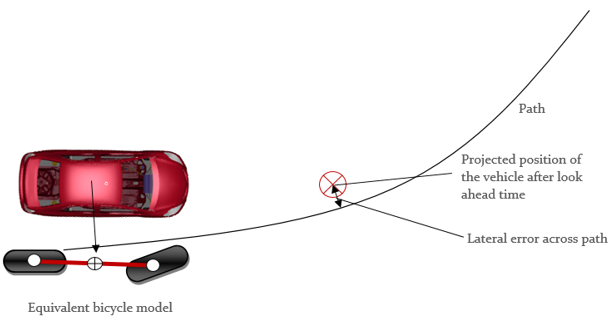
Similar to the Feed-forward throttle and brake controllers, the steering ff controller predicts the states of the vehicle after look ahead time or look ahead distance. It computes the appropriate steering angle to take the vehicle as close to centerline as possible after look ahead time or distance. The controller expects a 3d curve (X Y Z) or information to instantiate a parametric path (for example, dimensions of an entry distance/circle for a constant-radius cornering event).
Types:
| • | MOTION CONTROL - Driver output is steering wheel angle which is connected to the vehicle using a Motion. |
| • | TORQUE CONTROL - Driver output is steering torque which is applied to the steering wheel. |
Algorithm:
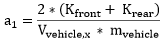
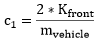
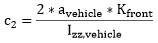
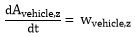
Uses the equivalent bicycle model to calculate the vehicle state derivatives.
Parameters
|
Cornering stiffness, front
|
K front
|
Cornering stiffness, rear
|
K rear
|
Front axle to vehicle CG distance along x
|
a vehicle
|
Rear axle to vehicle CG distance along x
|
b vehicle
|
Vehicle mass
|
m vehicle
|
Vehicle yaw inertia
|
I zz, vehicle
|
Steering ratio
|
 Steer ratio Steer ratio
|
Vehicle longitudinal velocity
|
V vehicle, x
|
Vehicle lateral velocity
|
V vehicle, y
|
Vehicle lateral displacement
|
y vehicle
|
Vehicle longitudinal displacement
|
x vehicle
|
Vehicle yaw rate
|
w vehicle, z
|
Vehicle heading angle
|
A vehicle, z
|
Steering angle
|
A steer
|
Delta
|

|








Driver then computes the steering wheel angle, minimizing the lateral error across path using the Newton-Raphson method.
Path specified using DDF: Feedforward steering with driver demand file for centerline. Nodes/points (not necessarily equally spaced) are specified in a tabular format in Cartesian coordinates.
[FEEDFORWARD_STEERING]
TAG = 'FEEDFORWARD'
LOOK_AHEAD_TIME = 0.5
PATH = 'DDF'
FILE = 'spiral.ddf'
INTEGRATION_STEP_SIZE = 0.01
[FEEDFORWARD STEERING CONTROLLER]
|
TAG
|
Attr - string
|
REQUIRED
<FEEDFORWARD >
|
LOOK_AHEAD_TIME
|
Attr - real
|
REQUIRED
Integrates states to (current time + look ahead time) to predict.
|
INTEGRATION_STEP_SIZE
|
Attr - Real
|
REQUIRED
| • | Step size for the integration involved in the prediction. |
| • | Smaller step size better prediction but more computation. |
| • | Recommended value look ahead time/50. |
|
AGGRESSIVE
|
Attr - Bool
|
OPTIONAL
| • | If TRUE, driver ignores the abort signal in case controller doesn’t converge to a feasible steering wheel angle. |
| • | Should be used when the vehicle runs at typically >60% of the vehicle limits. |
|
Notes:
| • | Smaller look ahead times leads to more accurate path following, but in the case of sudden path changes it may cause abrupt steering input that lead to simulation failures. |
| • | Larger look ahead times lead to more error between the desired and actual paths, however sudden path changes cause less abrupt steering inputs and generally lead to less simulation failures. |
| • | Predict forward distance = look ahead time * velocity. |
| • | Prediction algorithm involves internal integrator and hence, requires step size for the integration. Lower step size states are predicted more accurately, however simulation becomes computationally heavy. This step size is different from the h_max of MotionSolve. |
| • | Recommended value for decent accuracy and speed, look ahead time/50. |





