Driver
The Altair Driver is a set of MotionView models and libraries that drives virtual vehicles with closed loop and open loop inputs to perform a variety of events. Examples include driving on a rough, curving road while controlling speed for durability or ride comfort analysis, or driving a skid pad at increasing speed to predict understeer.
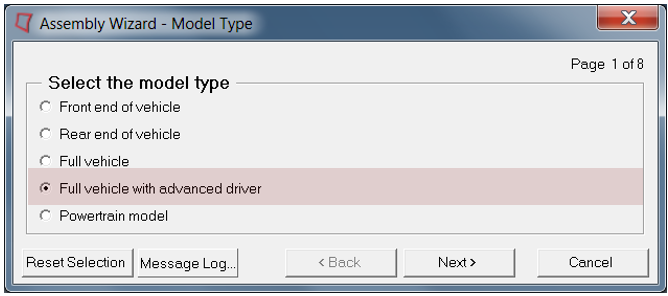
This is achieved by controlling the five vehicle inputs Steering, Throttle, Gear, Brake and Clutch so that the vehicle is able to accomplish the required maneuvers. The driver is completely integrated into MDLLIB. You can build a full vehicle for use with the Advanced Driver using MotionView’s Assembly Wizard. You do this by selecting the Full vehicle with advanced driver option, as shown in the dialog below.
Once a vehicle + driver is built, the next step is to define what the combined system should do. You specify driver events to do this. In this release, the input to the driver model is an “Advanced Driver File”. This is an ASCII TeimOrbit format file that scripts a simulation as a sequence of maneuvers. The Altair Driver and the Advanced Driver File support both open and closed loop events.
With Altair Driver File you can define any number of full vehicle events for the driver to execute.
| • | A complex simulation may be decomposed into many simpler “atomic maneuvers |
| - | You can select the controllers for vehicle inputs |
| - | You can define termination conditions for each maneuver. |
| • | You can define open loop, closed-loop or user-defined controllers to control: |
| - | Longitudinal speed or acceleration. |
| - | Vehicle path or lateral acceleration. |
| • | Switching controllers during a simulation |
| • | Defining path and speed profiles parametrically, in a table, or by referencing a data file. |
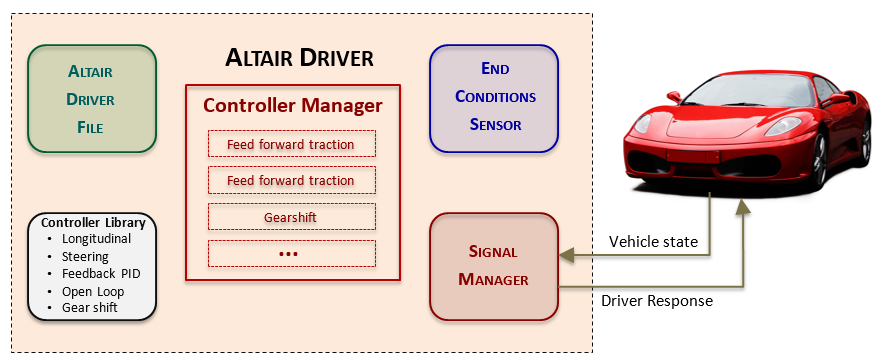
The overall relationship between the Altair Driver and the vehicle is shown in the figure below.
Full vehicle models built for use with the Advanced Driver include the following new systems:
| • | A four-wheel disc brake system for slowing the vehicle |
| • | Either a linear torque map power train or an IC engine with clutch and manual gearbox for accelerating the vehicle. |
Once the full vehicle is assembled use the task wizard from the Analysis menu to add an Advanced Driver Analysis as shown below.

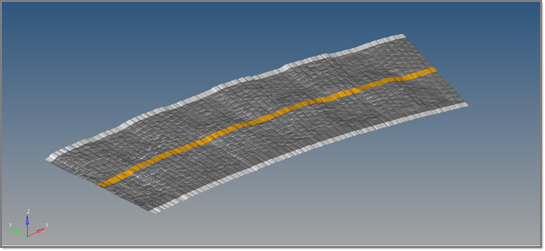
Road
Use the Road Graphics Tools to build a MotionView graphic system to visualize the road or to extract a driver path from Curved Regular Grid (.crg), Regular Grid (.rgr) and 3D Spline Road files. Using the Road Graphics Tool you can resample the road to reduce or increase the number points in the driver path or the number of surfaces in the resulting graphics. You can also add lane divider lines and shoulders to the road, and set the colors of the road, the lane divider lines, and shoulders.
The road graphic system the tool creates is automatically imported into your model, but also saved to disk so you import it in any MotionView model.