|
»Click here to display Table of Contents«
|

MotionView |

|

|

|

|
|
MotionView |
|
|

|

|
|
»Click here to display Table of Contents«
|
MotionView |
|
|
|
|
|
MotionView |
|
|
|
|
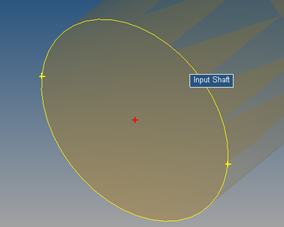
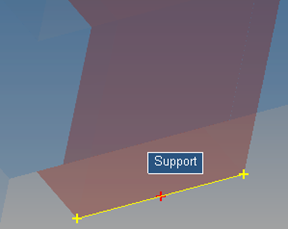
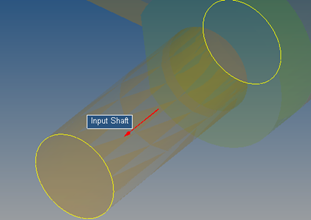
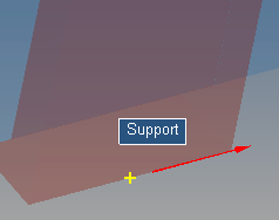
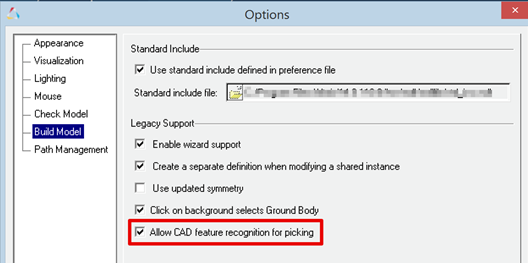
MotionView now provides the ability to use geometrical features such as edge and surfaces while creating entities. Through this feature, an edge or a surface of CADGraphics and primitive graphics such as Box and Cylinder can be used to pick origin or alignment axis for entities such as joints, bushings and forces. A point or a vector entity would be automatically created and resolved into the Entity panel.
While picking the point/vector, hover the mouse on the edge/surface to highlight it. While picking a point, a red cross mark + indicates the location of the point being created if clicked. Yellow cross marks + indicate other potential location on the edge. To use this feature, the option “Use CAD feature recognition for picking” needs to be turned on through Tools > Option > Build Model.
In addition, this option enables:
|
MotionSolve 14.0 introduced the “NLFE Body” as an experimental feature, which allows you to model non-linearly flexible beams and cables in your multi-body system. The NLFE Body is based on the Absolute Nodal Coordinate Formulation (ANCF). Nonlinearity can occur for two main reasons: (A) Geometric nonlinearity and (B) Material non-linearity. The NLFE body supports both. MotionView also introduced NLFE subsystems to model stabilizer bar and a helical spring system. This release includes a more robust functionality for the NLFE in MotionView. The following improvements have been implemented for this release:
|
|
A new air spring model is available as an Auto Entity in MotionView. The air spring force is interpolated from a table of force verses spring height and static inflation pressure, which is typically published by spring manufacturers. You enter the spring trim load and trim height and MotionSolve calculates the static inflation pressure automatically. You may include a bumpstop with the air spring as well. The air spring and bumpstop force properties are read from TeimOrbit format property files. To add an air spring to your MotionView model:
|
The Full Vehicle Kinematics and Compliance Event available via the task wizard in MotionView is now documented in the online help under the topic
|
The Auto Entities for MF-TYRE/MF-SWIFT, FTIRE/HTIRE, and CDTire now support offsetting the wheel/tire CM along the spin axis. A positive offset moves the CM outboard from the vehicle X-Z-plane. In addition you can offset the wheel hub graphics as well.
|
COSIN FTire shipped with MotionSolve 14.0.210 is updated to version 2016-1. However, in the future releases of MotionSolve, FTire binaries will not be included. Altair recommends obtaining FTire from COSIN and installing FTire independently of MotionSolve. When you run FTire with MotionSolve, the COSIN initialization file (e.g. cosin_2016-1.ini) is read to identify the FTire installation, so you can be assured that the latest installed version of FTire is used.
|
|
|