Many enhancements have been added to Linear Analysis. These include:
| • | A new option for “balancing” prior to eigenvalue analysis |
| • | Support for strain/dissipative energy calculations |
| • | Mode selection for linear analysis output |
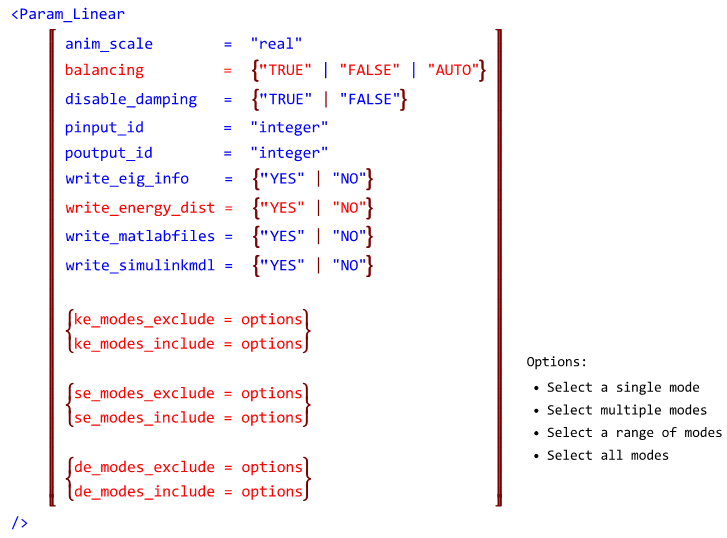
The updated statement is shown below with the 14.0 enhancements in red.
A new capability for “balancing” prior to eigenvalue analysis
For certain models, the eigenvalues calculated are sensitive to very minor changes in the state matrix used as input for the solution. This occurs when the eigenvector matrix is ill conditioned. MotionSolve detects an ill conditioned eigenvector matrix and “balances” the state matrix for a more robust eigenvalue solution.
Balancing refers to diagonally scaling the state matrix such that the row and column norms are numerically close to each other. You can control this behavior using the attribute “balancing” in the <Param_Linear> model or command statement.
Set “balancing” to “TRUE” to force MotionSolve to perform balancing on the state matrix and “FALSE” to disable balancing. The default for “balancing” is “AUTO” which lets the solver decide when balancing is required based on the condition number of the eigenvector matrix. Please note, that balancing is a very inexpensive operation.
Support for strain/dissipative energy calculations
For linear analyses, in addition to Kinetic Energy distribution, MotionSolve also calculates strain and dissipative energy for the following modeling elements:
| • | Force_SpringDamper (TSPDP/RSPDP) |
| • | Force_VectorOneBody/Force_VectorTwoBody (VFORCE, VTORQUE, GFORCE) |
| • | Force_Scalar_TwoBody (SFORCE) |
The KE, strain and dissipative energy distribution is written to the log file, on the screen and the *_linz.mrf output file. To request MotionSolve to calculate these distributions, set the write_energy_dist attribute to “TRUE” in the <Param_Linear> model or command statement.
Mode selection for linear analysis output
You can now specify the modes for which MotionSolve writes the energy distribution on screen and to the log file. This is useful when the number of eigenmodes is large and you are interested only in a subset.
You may specify mode numbers to include or exclude, for each of the three distributions. Please see the documentation on <Param_Linear> for more details on how this is done.
|