|
»Click here to display Table of Contents«
|

Constraint: PTdCV |

|

|

|

|
|
Constraint: PTdCV |
|
|

|

|
|
»Click here to display Table of Contents«
|
Constraint: PTdCV |
|
|
|
|
|
Constraint: PTdCV |
|
|
|
|
Model Element |
|||||||||
Description |
|||||||||
The Constraint_PTdCV element constrains a fixed point on a body to slide along a curve that passes through the origins of a specified set of markers. These markers may belong to different bodies. As the markers move in space, the curve is calculated at every time step using CUBIC spline interpolation through the marker origins. Hence, the curve deforms as the markers move about. This constraint is useful for simulating connection between a point on a body and a slender, flexible element such as a cable. For example, a ski chair-lift. |
|||||||||
Format |
|||||||||
<Constraint_PTdCV id = "integer" [ label = "string" ] i_marker_id = "integer" ref_dcurve_id = "integer" /> |
|||||||||
Attributes |
|||||||||
id |
Element identification number, (integer>0). This number is unique among all Constraint_PTdCV elements. |
||||||||
label |
The name of the Constraint_PTdCV element. |
||||||||
i_marker_id |
Specifies a Reference_Marker whose origin defines the point that is constrained to move along the deformable curve. |
||||||||
ref_dcurve_id |
Specifies the deformable curve used to define the Constraint_PTdCV element. |
||||||||
Comments |
|||||||||
If the current u value goes out of this range, MotionSolve will hold the u value at the boundary until the point falls back in range of the deformable curve. However, this may lead to incorrect results. You are encouraged to check the results for correctness in such a situation. For more information, please refer to the Reference_DeformCurve model element. |
|||||||||
Example |
|||||||||
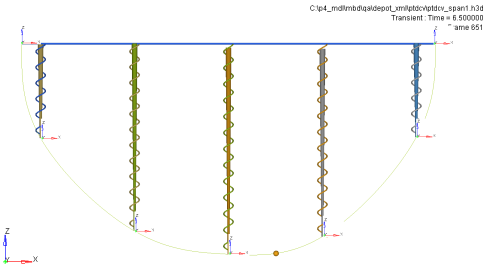
The following example demonstrates the use of the Constraint_PTdCV element, along with the Reference_DeformCurve and Post_Graphic elements.
Application of the Constraint_PTdCV element The figure above shows five slender, bar-shaped rigid bodies constrained to a ground body, represented by the blue horizontal bar graphic, by translational joints with axes along the Z direction. The bodies are connected to ground by linear spring-dampers. A deformable curve is defined to pass through seven markers shown in the figure. Five of these markers are located at the lower tips of the rigid bodies. Two of these markers are located at either end of the ground body. The deformable curve is defined using the Reference_DeformCurve element as follows: <Reference_DeformCurve id = "1" end_type_left = "NATURAL" end_type_right = "NATURAL" num_marker_id = "7"> 30101120 30102061 30103071 30104081 30105091 30106101 30101130 </Reference_DeformCurve>
<Post_Graphic id = "500000" type = "DeformCurve" curve_id = "1" nseg = "100" /> A small spherical body, shown with a yellow sphere, is constrained to slide along the deformable curve as follows: <Constraint_PTdCV id = "1" i_marker_id = "30107060" ref_dcurve_id = "1" /> Transient simulation of this system shows the changing shape of the deformable curve, as the sphere slides back and forth under gravity. |
|||||||||
Model Element |
|
Description |
|
PTDCV defines a constraint of a point to a deformed curve. This is an instance of a higher pair constraint. |
|
Declaration |
|
def PTDCV(id, LABEL=””, I= , DCURVE= ): |
|
Attributes |
|
id |
Element identification number (integer>0). This number is unique among all PTDCV elements. |
LABEL |
The name of the PTDCV element. |
I |
Defines the marker ID of the point. |
DCURVE |
Defines the ID of the deformed curve. |
CommentsSee Constraint_PTDCV |
|
ExampleThe example below shows a definition of a PTDCV. PTDCV(1, I=30107060, DCURVE=1) |
|
*PointToDeformableCurveJoint() (MDL Model statement)