|
»Click here to display Table of Contents«
|

Force: Penalty |

|

|

|

|
|
Force: Penalty |
|
|

|

|
|
»Click here to display Table of Contents«
|
Force: Penalty |
|
|
|
|
|
Force: Penalty |
|
|
|
|
Model Element |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Description |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Force_Penalty defines a generalized force whose purpose is to maintain a “soft” constraint in the system. This means that when the constraint is satisfied, there is no penalty force. However, if the constraint is violated, a penalty force that tries to reduce the violation is generated. The generalized force acts on all the coordinates involved in the definition of the constraint. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Format |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
<Force_Penalty id = "integer" [label = "string"] penalty = "double" [penalty1 = "double"]
[[ unilateral = "False" | "True" smoothing_factor = "real" ]]
{ type = "EXPRESSION" expr = "motionsolve_expression"
type = "USERSUB" usrsub_dll_name = "valid_path_name" usrsub_fnc_name = "custom_fnc_name" usrsub_param_string = "USER(par_1, ..., par_n)"
type = "USERSUB" script_name = "valid_path_name" interpreter = "PYTHON" | "MATLAB" usrsub_fnc_name = "custom_fnc_name" usrsub_param_string = "USER(par_1, ..., par_n)" } /> |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Attributes |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
id |
Specifies the element identification number (integer>0). This number is unique among all Reference_Variable elements. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
label |
This attribute describes the name of the Reference_Variable element. The description is primarily used to make the input more readable. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
penalty |
Specifies a penalty factor to be used in calculating the restoring force that is used to enforce that the algebraic constraint is always zero. Penalty > 0. See Comment 2 for more details on how this attribute is used. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
penalty1 |
Specifies a second penalty factor to be used in calculating the restoring force that is used to enforce that the time derivative of the algebraic constraint. The default value for Penalty1 is zero. When specified, Penalty1 ≥ 0. See Comment 3 for more details on how this attribute is used. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
unilateral |
A Boolean attribute. Select one from TRUE and FALSE. Indicates whether an equality constraint, or an inequality constraint is being specified. Unilateral is an optional attribute. If defaults to FALSE when not specified. For more information about equality and inequality constraints please see Comments 1 and 4. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
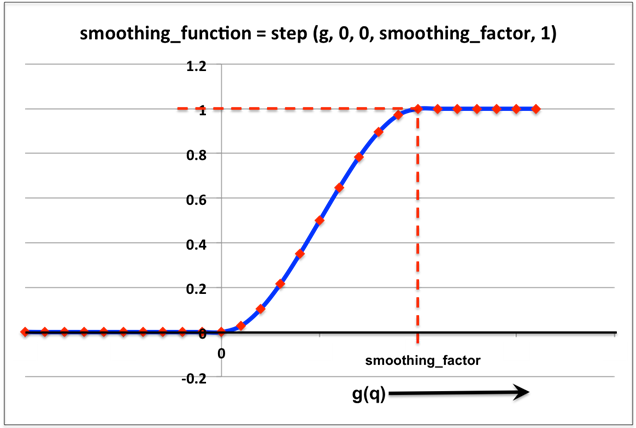
smoothing_factor |
The penalty force due to a unilateral constraint is ramped up in a smooth manner using a STEP function. This specifies the x-value at which the smoothing is completed. Smoothing_Factor > 0. For more information about smoothing, please see Comment 4. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
type |
Select from EXPRESSION and USERSUB. Specifies how the constraint governing the penalty force is defined.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
expr |
Specifies the MotionSolve expression that defines the algebraic constraint. Use this attribute only when type= EXPRESSION. Any valid run-time MotionSolve expression can be provided as input. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
usrsub_dll_name |
Specifies the path and name of the DLL or shared library containing the user subroutine. MotionSolve uses this information to load the user subroutine in the DLL at run time. Use this keyword only when type = USERSUB. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
usrsub_fnc_name |
This parameter allows you to specify the name for the user subroutine. The default name, PFOSUB, is used when the attribute is not specified. Use this keyword only when type = USERSUB. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
usrsub_param_string |
The list of parameters that are passed from the data file to the user-defined PFOSUB. Use this keyword only when type = USERSUB. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
script_name |
Specifies the path and name of the user written script that contains the function specified by usrsub_fnc_name. Use this keyword only when type = USERSUB. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
interpreter |
Specifies the interpreted language that the user script is written in. Valid choices are MATLAB or PYTHON. Use this keyword only when type = USERSUB. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Comments |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
One approach to solve the problem is to define a user-defined constraint and to provide the constraint g(q,t)=0 to MotionSolve. The constraint is enforced by an unknown Lagrange multiplier λ that is solved with the rest of the system variables.
For more information on the above-mentioned approach, see Constraint_General. Force_Penalty uses a slightly different method to accomplish the same. The constraint is “soft”, in other words, it is not strictly enforced. Violations of the constraint are allowed, but a restoring force tending to decrease the constraint violation is internally generated.
There is a close correspondence between a hard constraint with a Lagrange Multiplier and a soft constraint with a penalty force.
To enforce ġ(q̇,,q,t)=0, a second component –penalty1*ġ(q̇,,q,t) must be added to the penalty force computed earlier. To enforce both g(q,t)=0 and ġ(q̇,,q,t)=0, the following strategy is used:
When penalty1 is specified, MotionSolve uses the above equations to compute the penalty force and the generalized forces on the equations of motion.
Figure 1: The smoothing factor for unilateral constraints
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
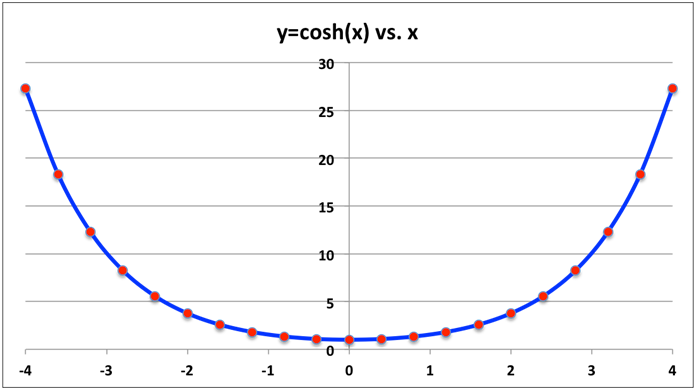
ExamplesExample-1: Assume a bead, modeled as a particle, is sliding on a catenary fixed in the global x-y plane as shown in Figure 2 below. The path of the bead is shown as a red circle, and the catenary as a blue line.
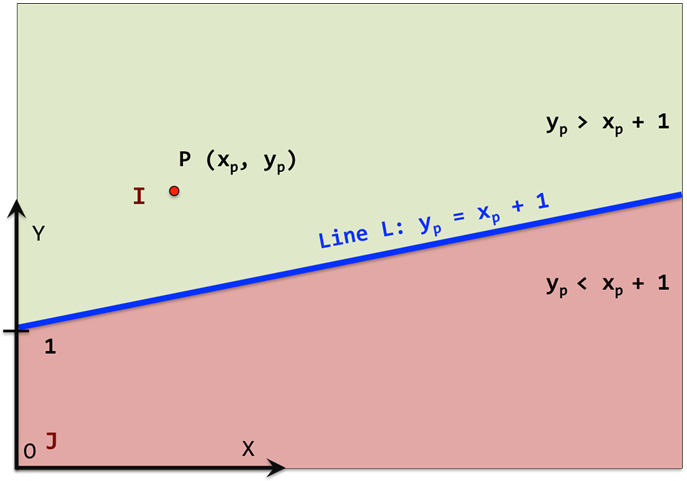
Figure 2: A bead sliding on a catenary The constraint is represented as: g(x,y) = y – cosh(x) = 0. The time derivative of the constraint is: ġ(ẋ,ẏ,x,y) = ẏ - sinh(x)ẋ = 0. Let MARKER 9 represent the center of mass of the bead. Assume a penalty of 1E4 is used to enforce the constraint, and a penalty of 1E2 to enforce the time derivative of the constraint. The MotionSolve Force_Penalty statement is: <Force_Penalty id = "1" label = "Particle sliding on a catenary" type = "EXPRESSION" expr = "dy(9) - cosh(dx(9))" penalty = "1E4" penalty1 ="1E2" /> The displacement constraint for the penalty force is: g = dy(9)-cosh(dx(9)) The velocity constraint for the penalty force is: ġ = vy(9)-sinh(dx(9)*vx(9) The penalty force that is computed by MotionSolve is: F = -1E4*g - 1E2*ġ = -1E4*[dy(9)-cosh(dx(9)] -1E2*[vy(9)-sinh(dx(9))*vx(9)] The generalized force that is computed by MotionSolve along global-X and global-Y is: Example-2: This example demonstrates how a simple unilateral constraint can be implemented with Force_Penalty. Figure 3 below shows a line L, y=1+x, defined in the coordinate system of a Marker, J.
Figure 3: A particle P bouncing on a line L: y=x+1 J has origin O, x-axis along X and y-axis along Y. A point P, belonging to another body, has coordinates (xp,yp) as measured in J. For the sake of convenience, define a Marker I=10, whose origin is at P. The constraint, which we wish to impose, is that as the point P moves, it must not penetrate the material under L. The objectives of this example are:
From simple coordinate geometry considerations, we can see that:
The constraint we wish to impose is: yp ≥ 1 + xp or 1 + xp – yp ≤ 0 The Force_Penalty definition is therefore: <Force_Penalty id = "10" label = "Enforce 1+x < = y" type = "EXPRESSION" expr = "1 + dx(10) - dy(10)" penalty = "1E4" penalty = "1E2" unilateral = "True" smoothing_factor = "1.0" /> Example-3: This example demonstrates how a simple unilateral constraint can be implemented with Force_Penalty. Figure 3 below shows a line L, y=1+x, defined in the coordinate system of a Marker, J.
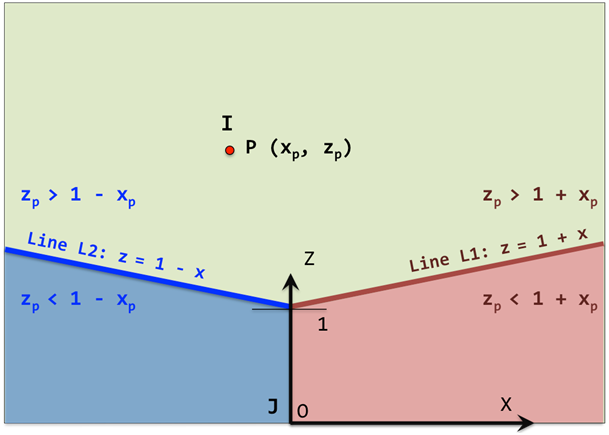
Figure 4: A particle P bouncing between two lines L1: z=1+x and L2: z=1-x J has origin O, x-axis along X and Z-axis along Z. A point P, belonging to another body, has coordinates (xp,zp) as measured in J. For the sake of convenience, define a Marker I=10, whose origin is at P. The constraint, which we wish to impose, is that as the point P moves, it must not penetrate the material under either L1 or L2. The objectives of this example are:
From simple coordinate geometry considerations, we can see that:
Similarly, we deduce that:
The constraints we wish to impose are:
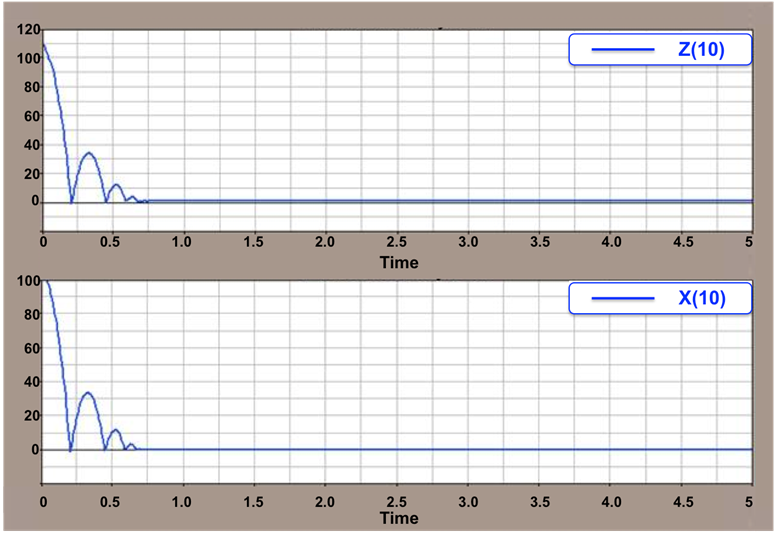
The Force_Penalty definitions are therefore: <Force_Penalty |<Force_Penalty id = "1" | id = "2" label = "Enforce 1+x<=z" | label = "Enforce 1-x<=z" type = "EXPRESSION" | type = "EXPRESSION" expr = "1+dx(10)-dz(10)" | expr = "1-dx(10)-dz(10)" penalty = "1E4" | penalty = "1E4" penalty1 = "1E2" | penalty1 = "1E2" unilateral = "True" | unilateral = "True" smoothing_factor = "1.0" | smoothing_factor = "1.0" /> |/> Figure 5 below shows the X and Z coordinates of particle P (Marker 10), when it starts from an initial condition of Xp=100 mm and Zp=120 mm and falls under the influence of gravity. The acceleration due to gravity is -9810 mm/s2 in the Z direction. The particle bounces between the two lines and eventually comes to rest at Zp=1 and Xp=0.
Figure 5: Z and X time history of particle P bouncing between two lines L1: z=1+x and L2: z=1-x |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Model Element |
|
Description |
|
PFORCE defines a penalty force whose purpose is to maintain a “soft” constraint in the system. This means that when the constraint is satisfied, there is no penalty force. However, if the constraint is violated, a penalty force that tries to reduce the violation is generated. The generalized force acts on all the coordinates involved in the definition of the constraint. |
|
Declaration |
|
def PFORCE(ID, LABEL="", FUNCTION="", PENALTY=0.0, PENALTY1=0.0, UNILATERAL=False, SMOOTHING_FACTOR=1.0, ROUTINE="", INTERPRETER="", SCRIPT=""): |
|
Attributes |
|
id |
Element identification number (integer>0). This number is unique among all the PFORCE elements. |
LABEL |
This attribute describes the name of the PFORCE element. The description is primarily used to make the input more readable. |
FUNCTION |
Specifies the MotionSolve expression that defines the algebraic constraint. Any valid run-time MotionSolve expression can be provided as input. Or The list of parameters that are passed from the data file to the user defined subroutine, PFOSUB. |
PENALTY |
Specifies a penalty factor to be used in calculating the restoring force that is used to enforce that the algebraic constraint is always zero. Penalty ≥ 0. |
PENALTY1 |
Specifies a second penalty factor to be used in calculating the restoring force that is used to enforce that the time derivative of the algebraic constraint. The default value for Penalty1 is zero. When specified, Penalty1 ≥ 0. |
UNILATERAL |
A Boolean attribute. Select one from TRUE and FALSE. TRUE indicates an inequality constraint (unilateral), and FALSE indicates an equality constraint (bilateral) is being specified. Unilateral is an optional attribute. It defaults to FALSE when not specified. |
SMOOTHING_FACTOR |
The penalty force due to a unilateral constraint is ramped up in a smooth manner using a STEP function. This specifies the x-value at which the smoothing is completed. SMOOTHING_FACTOR > 0. |
ROUTINE |
Specifies an alternative name for the user subroutine. |
INTERPRETER |
Specifies the interpreted language that the user script is written in. Valid choices are MATLAB or PYTHON. |
SCRIPT |
Specifies the path and name of the user written script that contains the routine. |
CommentsSee Force_Penalty |
|
ExampleThe first example shows how a PFORCE element may be defined.PFORCE(1,LABEL="Particle sliding on a catenary", FUNCTION="DY(9)-COSH(DX(9))", PENALTY=1e4, PENALTY1=1e2) The second example shows how a unilateral PFORCE element may be defined.PFORCE(10,LABEL="Enforce 1+x < = y", FUNCTION="1+DX(10)-DY(10)" PENALTY=1e4, PENALTY1=1e2,UNILATERAL=True, SMOOTHING_FACTOR=1) |
|
 .
.