|
»Click here to display Table of Contents«
|

Lse |

|

|

|

|
|
Lse |
|
|
|

|
|
»Click here to display Table of Contents«
|
Lse |
|
|
|
|
|
Lse |
|
|
|
|
Model Element |
||||||||||||||||||||||||||||||||||||||||
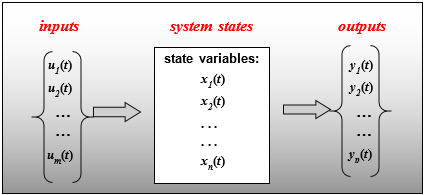
Class NameLse Description Lse is an abstract modeling element that defines a linear dynamic system. The dynamic system is characterized by a vector of inputs u, a vector of dynamic states x, and a vector of outputs y. The state vector x is defined through a set of differential equations. The output vector y is defined by a set of algebraic equations. The image below illustrates the concept of a dynamic system. |
||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||
Attribute Summary
Usage |
||||||||||||||||||||||||||||||||||||||||
# Defined in a compiled user-written subroutine Lse (x=objArray, A=objMatrix, optional_attributes) |
||||||||||||||||||||||||||||||||||||||||
Attribute Description |
||||||||||||||||||||||||||||||||||||||||
x |
Reference to an existing Array object of type “X” Specifies the Array used to store the states "x" of this LSE. You can use the Array() function to access the states in a MotionSolve expression. You can also use this in SYSFNC and SYSARY to access the state values from a user subroutine. This attribute is mandatory. |
|||||||||||||||||||||||||||||||||||||||
a |
Reference to an existing Matrix object Specifies the Matrix object containing the state matrix for the linear dynamic system. The A matrix encapsulates the intrinsic properties of the dynamic system. For instance, the eigenvalues of A represent the eigenvalues of the system. Similarly, the eigenvectors of A represent the mode shapes of the dynamic system. A is a constant valued matrix. It is required to be invertible. If there are nx states, the A matrix is of dimension nx x nx. This attribute is mandatory |
|||||||||||||||||||||||||||||||||||||||
Optional attributes |
||||||||||||||||||||||||||||||||||||||||
id |
Integer Specifies the element identification number. This number must be unique among all the LSE objects in the model. This attribute is optional. MotionSolve will automatically create an ID when one is not specified. Range of values: id > 0 |
|||||||||||||||||||||||||||||||||||||||
label |
String Specifies the name of the LSE object. This attribute is optional. When not specified, MotionSolve will create a label for you. |
|||||||||||||||||||||||||||||||||||||||
u |
Reference to an Array object of type U Specifies the ARRAY used to store the input u of this LSE. You can use the ARYVAL() function to access the inputs in a MotionSolve expression. You can also use SYSFNC and SYSARY to access the inputs in a user subroutine. This attribute is optional. |
|||||||||||||||||||||||||||||||||||||||
y |
Reference to an Array object of type Y Specifies the ARRAY used to store the output, y, of this LSE. You can use the ARYVAL() function to access the states in a MotionSolve expression. You can use SYSFNC and SYSARY to access the outputs in a user subroutine. This attribute is optional. |
|||||||||||||||||||||||||||||||||||||||
ic |
Specifies the Array used to store the initial values of the states, x of this LSE. This attribute is optional. When not specified, the initial values of all the states default to zero. |
|||||||||||||||||||||||||||||||||||||||
static_hold |
Boolean Specifies whether the value of the dynamic states are kept fixed or not during static equilibrium and quasi static solutions.
This attribute is optional. When not specified it defaults to False. |
|||||||||||||||||||||||||||||||||||||||
b |
Reference to an existing Matrix object Specifies the Matrix object containing the input matrix for the linear dynamic system. B is a constant valued matrix. If there are nx states and nu inputs, the B matrix is of dimension nx x nu. This attribute is optional. When not specified it is not used. |
|||||||||||||||||||||||||||||||||||||||
c |
Reference to an existing Matrix object Specifies the Matrix object containing the output matrix for the linear dynamic system. C is a constant valued matrix. If there are nx states and ny outputs, the C matrix is of dimension ny x nx. This attribute is optional. When not specified it is not used. |
|||||||||||||||||||||||||||||||||||||||
d |
Reference to an existing Matrix object Specifies the Matrix object containing the feed-forward (or feed-through) matrix for the linear dynamic system. D is a constant valued matrix. If there are ny outputs and nu inputs, the D matrix is of dimension ny x nu. This attribute is optional. When not specified it is not used. |
|||||||||||||||||||||||||||||||||||||||
active |
Bool Select one from True or False.
The attribute active is optional. When not specified, active defaults to True |
|||||||||||||||||||||||||||||||||||||||
Comments
|
||||||||||||||||||||||||||||||||||||||||
Examples
|
||||||||||||||||||||||||||||||||||||||||
# Define the Arrays first
x = Array (type=”X”) # State Array y = Array (type=”Y”) # Output Array
var8 = Variable(function=”10*sin(2*pi*time)”) # Forcing function u = Array (type=”U”, variables=[var8]) # Input Array
# Define the matrices now aValues = [ 0, 1, 0, -20, 0, 10, 10, 0, -10] a = Matrix (label=”A-Matrix”, rows=3, columns=3, full=”RORDER”, values=aValues)
bValues = [ 0, 1, 0 ] b = Matrix (label=”B-Matrix”, rows=3, columns=1, full=”RORDER”, values=bValues)
cValues = [ 0, 0, 1, 1, 0, 0] c = Matrix (label=”C-Matrix”, rows=3, columns=2, full=”RORDER”, values=cValues)
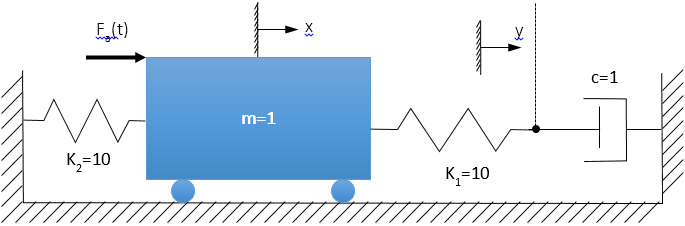
# Finally, define the linear system lse = Lse (label=”mass-spring-damper”, x=x, y=y, u=u, a=a, b=b, c=c) |
||||||||||||||||||||||||||||||||||||||||
The Lse represents the equations for the system shown below.
|
||||||||||||||||||||||||||||||||||||||||