| 1. | Eigenvector and Eigenvalue Analysis: |
The eigenvalues and eigenvectors of a nonlinear system can change with time. This analysis is useful for understanding the underlying vibration characteristics at a specific operating point or a series of operating points.
The eigenvalues represent the complex frequencies of vibration of the system and the eigenvectors represent the modes of vibration.
Given a set of inputs "u", a set of outputs "y" and a linearized mechanical system represented by a set of dynamical states "x", the transfer function for the system can be represented in the time domain as:
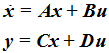
The matrices A, B, C and D are called the state matrices for the system. If there are nx states, nu inputs and ny outputs, the dimensions of the matrices are as follows:
The inputs "u" are defined using the Control_PlantInput modeling element specified in the pinput_id and the outputs "y" are defined using Control_PlantOutput modeling element specified in the poutput_id.
State matrix output is particularly useful for control engineers, who need a linear plant representation in order to design a controller.
Another common application of state matrices is to calculate the system Frequency Response Functions to a series of time-based inputs. This is the traditional vibration analysis of linearized mechanical systems.
| 3. | For state matrix calculations: |
| • | Matrices A,B,C, and D are written in MATLAB format in four separate files with extensions .a, .b, .c and .d, respectively. |
| • | When the write_simulinkmdl option is chosen, the A, B, C, and D matrices are written in Simulink format in a Simulink MDL file. |
| 4. | For Eigenvalue analysis: |
| • | Eigenvalues are written to the *.eig file. |
| • | To visualize the modeshapes, set the linear_animation = “TRUE” attribute in the <H3DOutput /> command. Each modeshape will be written as new subcase in the H3D file. |
| 5. | The significance of eigenvalues and eigenvectors may be ascertained from the brief discussion below: |
Once a linear analysis is initiated, the system is linearized to the form:
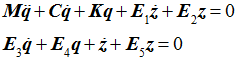
q represents the linearized displacement coordinates, z represents non-mechanical states due to other differential equations.
All constraints are eliminated from the formulation.
The equations are converted to first order form as follows:
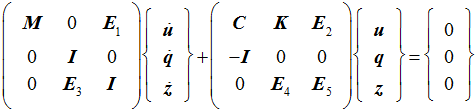
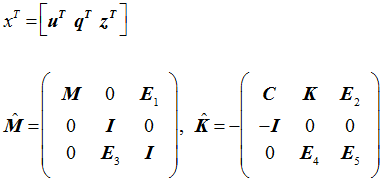
This results in the eigenvalue problem:

where
| • | Let an Eigenvalue be represented as |
 . .
The undamped natural frequency of the this mode is:
The damping ratio for this mode is:

The damped natural frequency for this mode is:
| • | The real part of the Eigenvalue corresponds to the system damping. For all stable systems, this must be less than zero. A positive real component for an eigenvalue indicates instability in the system. The system becomes unstable if this mode is ever excited. Such designs are to be avoided. |
| • | By successfully varying design parameters like stiffness and damping in the system and calculating the eigenvalues, a root locus plot of the system at an operating point can be generated. |
| • | The eigenvectors can be used to validate the analytical model with actual physical tests that may have been performed in the frequency domain. |
| 6. | The significance of the state matrices may be ascertained from the following: |
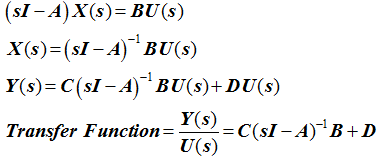
| • | Take the Laplace transform of the linearized equations of motion: |

Ignoring the initial value X(0), and rearranging terms, you get:
| • | Compliance matrices are used in the automotive industry for suspension design. A compliance matrix is a MIMO transfer function that relates a set of forces and torques applied at specific points on the suspension to the displacements measured at other specific points on the suspension. |
| • | Traditionally, compliance matrices have been computed about a static equilibrium position and the data used for suspension design. This approach ignores three effects: (a) The effects of inertia and damping on the system compliance, (b) the variation of compliance on during vehicle operation, and (c) The variation of compliance with the frequency of the input. |
The use of ABCD matrices to calculate the compliance transfer function about dynamic operating points overcomes all of these issues.
| 7. | If write_energy_dist is set to TRUE, MotionSolve computes the kinetic, strain and dissipative energy distributions for parts and forces in the model for the modes specified. Note, if write_energy_dist is set to FALSE, MotionSolve will not compute any energy distribution regardless of the ke_modes_include/ke_modes_exclude, se_modes_include/se_modes_exclude or de_modes_include/de_modes_exclude attributes and their values. |
You may specify the modes for which MotionSolve should compute the energy distributions. This can be useful when there are a large number of modes in your system and you are interested only in the energy distribution for a subset of these modes.
You can specify the modes MotionSolve should include or exclude, separately for kinetic, strain or dissipative energy by using the following attributes:
| • | ke_modes_include – for including modes in the kinetic energy distribution |
| • | ke_modes_exclude – for excluding modes in the kinetic energy distribution |
| • | se_modes_include – for including modes in the strain energy distribution |
| • | se_modes_exclude – for excluding modes in the strain energy distribution |
| • | de_modes_include – for including certain in the dissipative energy distribution |
| • | de_modes_exclude – for excluding certain in the dissipative energy distribution |
Typically, you only need to specify the modes to be included, or the modes to be excluded, but not both. If you specify both – modes to be included and modes to be excluded, the definition that appears later in the Param_Linear statement will be honored.
Kinetic Energy:
MotionSolve computes the modal kinetic energy distribution for all bodies in the MBD model, for the modes specified. These are then written to the log file in tabular format. Each row in this table represents a body. Within a row, each number represents the percentage distribution of modal kinetic energy between the translational (X, Y, Z), rotational (RXX, RYY, RZZ) and cross-rotational, RXY, RXZ, RYZ directions of the part. The total modal kinetic energy distributions for each mode should add up to 100%.
Strain and Dissipative Energy:
MotionSolve can also compute the modal strain and dissipative energy distribution for certain force entities in the MBD model, for the modes specified (these are listed in the table below). The energy distributions are then written to the log file in tabular format. Each row in this table represents a force entity. Within a row, each number represents the percentage distribution of modal strain or dissipative energy between the translational (X, Y, Z) and rotational (RX, RY, RZ) directions.
Model element
|
Total
|
X
|
Y
|
Z
|
RX
|
RY
|
RZ
|
Force_Beam
|
Yes
|
Yes
|
Yes
|
Yes
|
Yes
|
Yes
|
Yes
|
Force_Bushing
|
Yes
|
Yes
|
Yes
|
Yes
|
Yes
|
Yes
|
Yes
|
Force_Field
|
Yes
|
Yes
|
Yes
|
Yes
|
Yes
|
Yes
|
Yes
|
Force_Vector_OneBody, Force_Vector_TwoBody
type = ForceAndTorque
|
Yes
|
Yes
|
Yes
|
Yes
|
Yes
|
Yes
|
Yes
|
Force_Vector_OneBody, Force_Vector_TwoBody
type = ForceOnly
|
Yes
|
Yes
|
Yes
|
Yes
|
No
|
No
|
No
|
Force_Vector_OneBody, Force_Vector_TwoBody
type = TorqueOnly
|
Yes
|
No
|
No
|
No
|
Yes
|
Yes
|
Yes
|
Force_Scalar_TwoBody
type = Force
|
Yes
|
Yes
|
Yes
|
Yes
|
No
|
No
|
No
|
Force_Scalar_TwoBody
type = Torque
|
Yes
|
No
|
No
|
No
|
No
|
No
|
No
|
ForceSpringDamper
type=TRANSLATION
|
Yes
|
Yes
|
Yes
|
Yes
|
Yes
|
Yes
|
Yes
|
Force_SpringDamper
type = ROTATION
|
No
|
No
|
No
|
No
|
No
|
No
|
No
|
Note: If a force entity does not contribute to the modal strain or dissipative energy, then that force entity’s row will be all zero.
In addition to the energy distribution tables, MotionSolve also displays a header for each mode that includes information about the mode number, damping ratio, undamped natural frequency and the absolute value of the modal kinetic energy. An example of this energy distribution that is written to the output log file is shown below:
*************************
Mode number = 10
Damping ratio = 5.0000000E-02
Undamped natural freq.= 1.5915494E+00
Kinetic energy = 1.1427840E-05
Percentage distribution of Kinetic energy
| X Y Z RXX RYY RZZ RXY RXZ RYZ
+----------------------------------------------------------------
PART/30301 | 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00
PART/30302 | 0.00 98.69 0.00 1.31 0.00 0.00 0.00 0.00 0.00
+----------------------------------------------------------------
Percentage distribution of Strain energy
| Total X Y Z RXX RYY RZZ
+-------------------------------------------------
VFOR/30301 | 0.00 0.00 0.00 0.00
VFOR/30302 | 0.00 0.00 0.00 0.00
SPDP/303001 | 0.00 0.00 0.00 0.00 0.00 0.00 0.00
SPDP/303002 | 50.00 50.00 0.00 0.00 0.00 0.00 0.00
SPDP/303003 | 50.00 50.00 0.00 0.00 0.00 0.00 0.00
+-------------------------------------------------
Percentage distribution of Dissipative energy
| Total X Y Z RXX RYY RZZ
+-------------------------------------------------
VFOR/30301 | 0.00 0.00 0.00 0.00
VFOR/30302 | 0.00 0.00 0.00 0.00
SPDP/303001 | 0.00 0.00 0.00 0.00 0.00 0.00 0.00
SPDP/303002 | 50.00 50.00 0.00 0.00 0.00 0.00 0.00
SPDP/303003 | 50.00 50.00 0.00 0.00 0.00 0.00 0.00
+-------------------------------------------------
These energy distributions are additionally written to the output *_linz.mrf file which may be used for post-processing.
Note: The *_linz.mrf contains information for all the modes irrespective of which were specified for inclusion or exclusion by the user.
| 8. | For certain models, the eigenvalues computed by MotionSolve can be extremely sensitive to small perturbations in the matrix. This occurs because the eigenvector matrix, matrix. This occurs because the eigenvector matrix,  , for such a model is highly ill conditioned. As a result, even seemingly minor changes for such models may result in large changes in the eigenvalue solution. , for such a model is highly ill conditioned. As a result, even seemingly minor changes for such models may result in large changes in the eigenvalue solution. |
The condition number of a matrix,  , ,  is defined as is defined as 
Consider the linear equation  . .  measures the rate at which the solution measures the rate at which the solution  will change due to a change in will change due to a change in  . .
If  is large, then even a small change in is large, then even a small change in  can cause large changes in the solution can cause large changes in the solution  . In such as case, the matrix . In such as case, the matrix  is said to be ill conditioned. is said to be ill conditioned.
To obtain a robust eigenvalue solution in such cases, MotionSolve must balance the  matrix by finding a diagonal similarity transformation matrix by finding a diagonal similarity transformation  such that the row and column norms of such that the row and column norms of  are numerically close. By doing so, the eigenvector matrix becomes better conditioned and the eigenvalue solution is more robust to perturbations in are numerically close. By doing so, the eigenvector matrix becomes better conditioned and the eigenvalue solution is more robust to perturbations in  . .
The value of the balancing attribute controls whether matrix balancing is done or not.
| • | Set this to TRUE to always balance the  matrix irrespective of whether the eigenvector matrix is ill conditioned or not. matrix irrespective of whether the eigenvector matrix is ill conditioned or not. |
| • | Set balancing to FALSE to never balance the matrix. matrix. |
| • | The default for balancing is AUTO which lets MotionSolve decide whether balancing is needed or not. |
| o | Let  be the reciprocal of the condition number of be the reciprocal of the condition number of  |
| o | If  , then balancing is performed , then balancing is performed |
| o | If  , then balancing is not performed , then balancing is not performed |
If  = 2.2E-16, then balancing is performed when R < 500 * 2.2E-16 = 1.11 E-13. = 2.2E-16, then balancing is performed when R < 500 * 2.2E-16 = 1.11 E-13.
| 9. | While balancing a matrix is generally a good idea, you need to be judicious in its use. There are some rare situations in which balancing will not provide the benefits you expect. Specifically you should be aware of the following: |
| • | If a matrix contains small elements that are due to round off error, balancing might make them more significant than they should be. MotionSolve tries to minimize this by zeroing out very small entries in the Jacobian. |
The condition number of the eigenvector matrix,  , can only be computed after , can only be computed after  is computed. When balancing is set to AUTO, the eigenvalue solver may be called twice: first without balancing and then, if is computed. When balancing is set to AUTO, the eigenvalue solver may be called twice: first without balancing and then, if  is small, with balancing. So an increase in run time may occasionally be seen. is small, with balancing. So an increase in run time may occasionally be seen.
| 10. | MotionSolve does not support all modeling elements for a linear analysis. The following elements are currently not supported: |
| • | Body_Flexible (NLFE bodies only) |
| • | Reference_Variable (Implicit only) |
|






