|
»Click here to display Table of Contents«
|

Part |

|

|

|

|
|
Part |
|
|
|

|
|
»Click here to display Table of Contents«
|
Part |
|
|
|
|
|
Part |
|
|
|
|
Model Element |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Class NamePart Description |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Part defines a rigid body object in MotionSolve. This entity has mass and inertia properties. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Attribute Summary
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Usage |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Part (optional_attributes) # All attributes are optional |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Attribute Description |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
id |
Integer Specifies the element identification number. This number must be unique among all the Part objects in the model. This attribute is optional. MotionSolve will automatically create an ID when one is not specified. Range of values: id > 0 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
label |
String Specifies the name of the Part object. This attribute is optional. When not specified, MotionSolve will create a label for you. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
ground |
Boolean Specifies whether the Part being defined is the Ground PART or not. The value True indicates that the PART being defined is the Ground PART. The value False indicates that the Part is not the Ground Part. This attribute is optional. When not specified, it defaults to False. Valid range of values: True, False |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
mass
|
Double Specifies the mass of the PART object. The attribute mass is optional. If a Part is fully constrained and you are not interested in the constraint forces, then mass needs not to be specified. When not specified, mass is set to zero. Valid range of values: mass ≥ 0.0 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
cm |
Reference to a Marker Specifies the Marker that is located at the center-of-mass of the PART. The attribute cm is optional. If a Part is fully constrained and you are not interested in the constraint forces, then mass and inertia need not to be specified. When these are not specified, you must not specify CM. Note: In order to remove circular references, the body is created in two steps. First the body is defined without a CM marker. Then the CM attribute is explicitly defined. See examples 3-5. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
im
|
Reference to a Marker Specifies the Marker in whose coordinate system the inertia matrix for the PART is computed. The attribute im is optional. When not specified, im defaults to the CM marker. Note: The IM attribute is defined in two steps. First the body is defined without an IM marker. Then the IM attribute is explicitly defined. See examples 5. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
ip |
List of 3 doubles or a list of 6 doubles Specifies the mass moments of inertia matrix for the PART about the x, y, z-axes of the IM marker. The ip attribute is optional. When not specified, it is assumed to be the zero matrix. If a Part is fully constrained and you are not interested in the constraint forces, then ip need not be specified. You may choose to specify only the diagonal entries [Ixx, Iyy, Izz] or the full matrix [Ixx, Iyy, Izz, Ixy, Ixz, Iyz] in the order shown. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
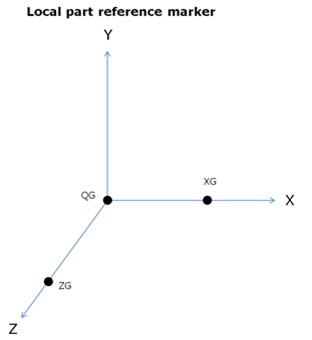
qg
|
A Location object or a list of 3 doubles Specifies the coordinates of local part reference Marker. This Marker is used as the reference coordinate system for all Markers defined on this PART. The qg attribute is optional. When not specified, it is assumed to be coincident with the global origin, i.e. (0, 0, 0). |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
zg
|
A Location object or a list of 3 doubles Specifies the coordinates of a point on the z-axis of the local part reference Marker. This Marker is used as the reference coordinate system for all Markers defined on this Part. The zg attribute is optional. When not specified, the point is assumed to be on the global z-axis. The zg/xg attribute is exclusive to reuler and function. Only one of them may be specified. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
xg
|
A Location object or a list of 3 doubles Specifies the coordinates of a point on the x-axis of the local part reference Marker. This Marker is used as the coordinate system for all Markers defined on this Part. The xg attribute is optional. When not specified, the point is assumed to be on the global x-axis. The zg/xg attribute is exclusive to reuler and function. Only one of them may be specified. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
reuler
|
A list of 3 doubles Specifies the body-fixed 3-1-3 Euler angles of the local part reference Marker with respect to the global coordinate system. This Marker is used as the reference coordinate system for all Markers defined on this Part. The reuler attribute is optional. When not specified, it is assumed to be (0,0,0), i.e. the local part reference Marker has the same orientation as the global coordinate system. The reuler attribute is exclusive to function and zg/xg. Only one of them may be specified. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
vm |
Reference to a Marker Specifies the Marker whose axes system would be used to define the initial translational velocities of the PART (vx, vy, vz). When not specified vm defaults to Global coordinate system. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
vx |
Double Specifies the initial translational velocity of the PART along the x-axis of the VM marker. The vx attribute is optional.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
vy |
Double Specifies the initial translational velocity of the PART along the y-axis of the VM marker. The vy attribute is optional.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
vz |
Double Specifies the initial translational velocity of the PART along the z-axis of the VM marker. The vz attribute is optional.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
wm
|
Reference to a Marker Specifies the Marker whose axes system would be used to define the initial angular velocities of the PART (wx, wy, wz). When not specified it defaults to PART CM coordinate system. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
wx |
Double Specifies the initial angular velocity of the PART about the x-axis of the WM marker. The wx attribute is optional.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
wy |
Double Specifies the initial angular velocity of the PART about the y-axis of the WM marker. The wy attribute is optional.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
wz |
Double Specifies the initial angular velocity of the PART about the z-axis of the WM marker. The wz attribute is optional.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
planar |
One of the following strings: "XY” “YZ” “ZX” “YX” “ZY” “XZ" Specifies that this body is constrained to move in a plane and the plane in which it moves. The attribute planar is optional. Legal values: “XY” or “YZ” or “ZX” or “YX” or “ZY” or “XZ” |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
function
|
String Specifies the list of parameters that are passed from the data file to the user-written defined. The attribute function is optional. The function attribute is exclusive to reuler and zg/xg. Only one of them may be specified. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
routine |
String or a pointer to a function Specifies an alternative name for the user subroutine. The attribute routine is optional. The default name of the user subroutine is MASS_READ. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Comments
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Examples
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
ground = Part (ground=True) |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
dummyBody = Part () |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
body1 = Part (mass=1) body1.cm = Marker (body=body1, qp=[12, -13, 14], zp=[14, -13, 14]) |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Note: In order to remove circular references, the body is created in two steps. First the body is defined without a CM marker. Then the CM attribute is explicitly defined. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
body2 = Part (mass=1, qg=[10, 0, 0], zg=[10, 1, 0], xg=[10, 0, 1]) body2.cm = Marker (body=body2, qp=[12, -13, 14], zp=[14, -13, 14]) |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
body0 = Part (label="body 0", mass=1, ip=[0.0004892316,0.0004892316,0.0004892316,0,0,0], vx=1, vy=0, vz=0, wx=2, wy=3, wz=4) body0.cm = Marker (body=body0, qp= qp=[12, -13, 14], zp=[14, -13, 14]) body0.im = body0.cm |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Assume that a rigid body object has been created using the fifth example. The dot operator may be used as shown below to get the attributes for a part: |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
cm = body0.cm # The CM marker for the part body0 mass = body0.mass # The mass of the part body0 ip = body0.ip # The inertia matrix for part body0 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||