|
»Click here to display Table of Contents«
|

SET_DISCRETE_INTERFACE |

|

|

|

|
|
SET_DISCRETE_INTERFACE |
|
|
|

|
|
»Click here to display Table of Contents«
|
SET_DISCRETE_INTERFACE |
|
|
|
|
|
SET_DISCRETE_INTERFACE |
|
|
|
|
Subroutine Type |
Utility/Setup |
||||||||||||
Definition |
The SET_DISCRETE_INTERFACE subroutine tells the solver to call the user-written subroutine discretely at successful integration steps. |
||||||||||||
Use |
The function can be called by SFOSUB, VFOSUB, VTOSUB, GFOSUB, DIFSUB, or VARSUB. |
||||||||||||
Calling Syntax |
FortranSET_DISCRETE_INTERFACE ()
C/C++c_set_discrete_interface()
Pythonpy_set_discrete_interface() |
||||||||||||
Input Arguments |
None. |
||||||||||||
Output Values |
None. |
||||||||||||
Comments |
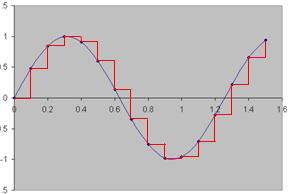
Zero Order Hold
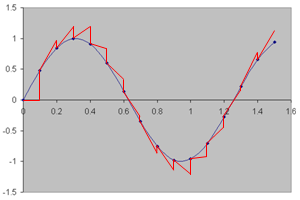
First Order Hold
|
See Also: