|
»Click here to display Table of Contents«
|

SET_GSE_ALGEBRAIC_EQN |

|

|

|

|
|
SET_GSE_ALGEBRAIC_EQN |
|
|
|

|
|
»Click here to display Table of Contents«
|
SET_GSE_ALGEBRAIC_EQN |
|
|
|
|
|
SET_GSE_ALGEBRAIC_EQN |
|
|
|
|
Subroutine Type |
Setup utility subroutine for GSE. |
|||||||||
Definition |
The SET_GSE_ ALGEBRAIC_EQN subroutine is used with GSESUB to specify the implicit, algebraic equation. |
|||||||||
Use |
Fortran SET_GSE_ALGEBRAIC_EQN (gse_id, eqn_idx, errflag)
C/C++ c_set_gse_algebraic_eqn (gse_id, eqn_idx, errflag);
Python py_set_gse_algebraic_eqn(gse_id, eqn_idx, errflag) |
|||||||||
Input Arguments |
gse_id |
Type = integer. The identifier of the GSE element. |
||||||||
eqn_idx |
Type = integer. The equation index of the algebraic equations. |
|||||||||
Output Values |
errflag |
Type = integer. Returns information about the call status. A non-zero value indicates failure. |
||||||||
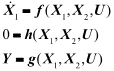
Comments |
However, in some cases, the state equations may involve both differential and algebraic equations. For example:
When this occurs, it is necessary to tell MotionSolve the equation indices of the algebraic equations associated with the algebraic state X2, using SET_GSE_ ALGEBRAIC_EQN. For example, call: SET_GSE_ALGEBRAIC_EQN (gse_id, 2, errflag)
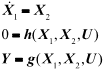
into the explicit form that can be solved in MotionSolve. For example, define:
The implicit form can be converted to the following differential algebraic equations:
This is in the same DAE form shown in the previous remark. |
|||||||||