In this tutorial, you will learn how to:
| • | Assemble the vehicle for full vehicle simulations using Assembly Wizard |
| • | Attach the driver using Task Wizard |
What is Altair Advanced Driver?
The Altair Driver is a set of MotionView models and libraries that allows MotionView users to control and script vehicle events. Example events include:
| • | Constant Radius Cornering |
| • | User Defined Path Following |
This is achieved by creating an interface to the five vehicle inputs:
Using Altair Driver you can simulate any number of full vehicle events using these features:
| • | Scripting – break up the simulation into different maneuvers; select the controllers for vehicle inputs and define conditions that end each maneuver. |
| • | Open-loop, closed-loop, and user-defined controllers to control. |
| - | Longitudinal speed or acceleration. |
| - | Vehicle path or lateral acceleration. |
| • | Switching controllers during a simulation. |
| • | Defining path and speed profiles parametrically, in a table, or by referencing a data file. |
Exercise
Step 1: Assembling the vehicle.
| 1. | Start a new MotionView session. |
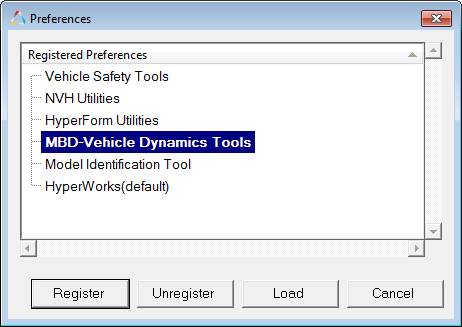
| 2. | Make sure that the MBD-Vehicle Dynamics Tools preference file loaded is for all of the MotionView functionality of the Advanced Driver to work properly. |
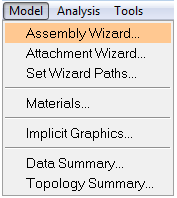
| 3. | Use the Assembly Wizard to assemble the vehicle model. In the first example, a linear torque map powertrain will be used to avoid the complexity of adding controllers for gear and clutch. |
| 4. | Choose Full vehicle with advanced driver option. This takes care of all the dependencies of the advanced driver. Click Next. |
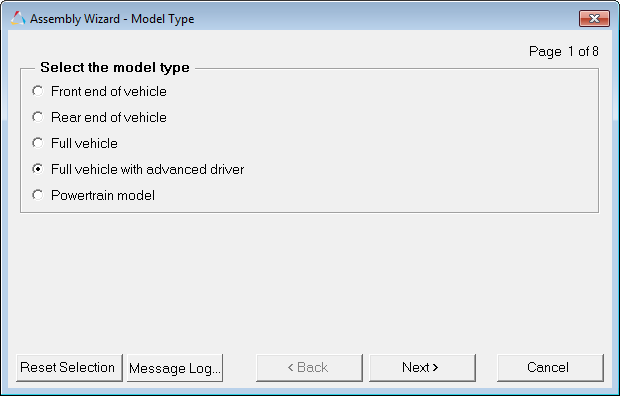
| 5. | Choose the default selections in the following Assembly Wizard pages. |
Page
|
Label
|
Selection
|
Default (Yes/No)
|
1
|
Model type
|
Full vehicle with advanced driver
|
No
|
2
|
Driveline configuration
|
Front wheel drive
|
Yes
|
3
|
Vehicle body
|
Body
|
Yes
|
3
|
Front suspension
|
Frnt macpherson susp (1 pc. LCA)
|
Yes
|
3
|
Steering linkages
|
Rackpin steering
|
Yes
|
3
|
Rear subframe
|
None
|
Yes
|
3
|
Rear suspension
|
Rear quadlink susp
|
Yes
|
3
|
Powertrain
|
Linear torque map powertrain
|
Yes
|
3
|
Signal generator
|
Driver signal generator
|
Yes
|
3
|
Tires
|
FIALA/HTIRE
|
Yes
|
4
|
Steering column
|
Steering column 1 (not for abaqus)
|
Yes
|
4
|
Steering boost
|
None
|
Yes
|
5
|
Front struts
|
Frnt strut (with inline jts)
|
Yes
|
5
|
Front stabilizer bars
|
None
|
Yes
|
5
|
Rear struts
|
Rear strut (with inline jts)
|
Yes
|
5
|
Rear stabilizer bars
|
None
|
Yes
|
6
|
Front jounce bumpers
|
None
|
Yes
|
6
|
Front rebound bumpers
|
None
|
Yes
|
6
|
Rear jounce bumpers
|
None
|
Yes
|
6
|
Rear rebound bumpers
|
None
|
Yes
|
7
|
Disk brakes
|
Disk brakes
|
Yes
|
7
|
Front driveline
|
Independent fwd
|
Yes
|
8
|
|
Next
|
No
|
9
|
|
Finish
|
No
|
Step 2: Adding driver analysis.
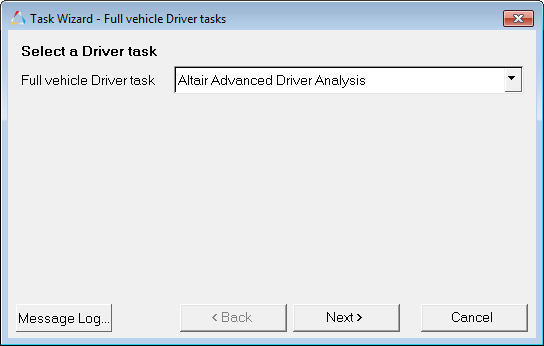
Use the Task Wizard to load the driver analysis.
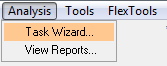
| 1. | From the Analysis menu, select Task Wizard. |
| 2. | Select Altair Advanced Driver Analysis from the Full vehicle Driver task drop-down menu. |
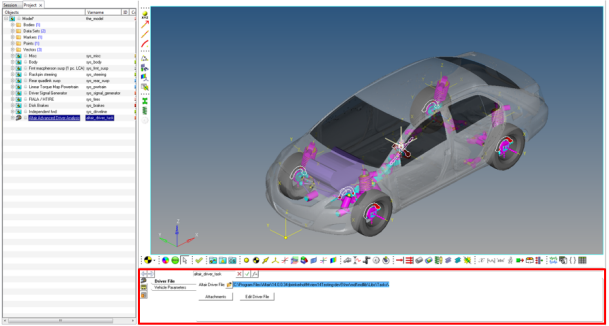
The Altair Advanced Driver with  icon is added to the browser tree. Selecting the driver icon will open up the Altair Driver panel. This automatically resolves all of the vehicle attachments for the Advanced Driver.
icon is added to the browser tree. Selecting the driver icon will open up the Altair Driver panel. This automatically resolves all of the vehicle attachments for the Advanced Driver.
Step 3: Writing an Altair Driver File (ADF) driving event .
Driver requires an event script or the Altair driver file (ADF) to run any driving event. ADF can be edited using any text editor or by clicking the Edit Driver File button on the driver panel.
Example #1 Open Loop Acceleration Event
The objective of the example is to script an event with 50% throttle, 0% brake and 0 steering angle. An event can be broken down into smaller sub-events or maneuvers. For the sake of simplicity we will model this as a single maneuver event.
| 1. | Open any text editor and copy and paste the following text into it. Be sure to read through the comments for a better understanding on what is written in the ADF. |
$-----------------------------------------------------------------ALTAIR_HEADER
$ This block is required for version control
[ALTAIR_HEADER]
FILE_TYPE = 'ADF'
FILE_VERSION = 1.0
FILE_FORMAT = 'ASCII'
$--------------------------------------------------------------------------UNITS
$In this block we specify the units in which this file should be read
[UNITS]
(BASE)
{length force angle mass time}
'meter' 'newton' 'radians' 'kg' 'sec'
$--------------------------------------------------------------------VEHICLE_IC
$In this block we specify the initial conditions specifically initial speed of the
$vehicle with respect to the vehicle IC marker in the driver attachments
[VEHICLE_INITIAL_CONDITIONS]
VX0 = -20.0
VY0 = 0.0
VZ0 = 0.0
$--------------------------------------------------------------STEERING_STANDARD
$This block specifies the saturation and cutoff frequency for the low pass filter for
$steering output signal. These signals are global and are active for the entire event
[STEER_STANDARD]
MAX_VALUE = 3.141593
MIN_VALUE = -3.141593
SMOOTHING_FREQUENCY = 10.0
INITIAL_VALUE = 0.0
$--------------------------------------------------------------THROTTLE_STANDARD
$This block specifies the saturation and cutoff frequency for the low pass filter for
$throttle output signal
[THROTTLE_STANDARD]
MAX_VALUE = 1.0
MIN_VALUE = 0.00
SMOOTHING_FREQUENCY = 10.0
INITIAL_VALUE = 0.5
$---------------------------------------------------------------BRAKING_STANDARD
$This block specifies the saturation and cutoff frequency for the low pass filter for
$brake output signal
[BRAKE_STANDARD]
MAX_VALUE = 1.0
MIN_VALUE = 0.0
SMOOTHING_FREQUENCY = 10.0
INITIAL_VALUE = 0.0
$-----------------------------------------------------------------MANEUVERS_LIST
$This block provides the list of all the maneuvers, simulation time for each maneuver
$maximum solver step size (hmax) and print interval
[MANEUVERS_LIST]
{ name simulation_time h_max print_interval}
'MANEUVER_1' 5.0 0.01 0.01
$---------------------------------------------------------------------MANEUVER_1
[MANEUVER_1]
$This block provides the ties controllers to each driver output
TASK = 'STANDARD'
(CONTROLLERS)
{DRIVER_SIGNAL PRIMARY_CONTROLLER ADDITIONAL_CONTROLLER}
STEER OL_STEER_0 NONE
THROTTLE OL_0.5 NONE
BRAKE OL_0 NONE
$---------------------------------------------------------OL_STEER
$This is controller block containing all the information required by
$the driver to construct the controller. Different controllers have
$different requirements. Here we are using open loop constant type
$of controller.
[OL_STEER_0]
TAG = 'OPENLOOP'
TYPE = 'CONSTANT'
VALUE = 0.0
$---------------------------------------------------------OL_BRAKE
[OL_0]
TAG = 'OPENLOOP'
TYPE = 'CONSTANT'
VALUE = 0.0
$---------------------------------------------------------OL_THROTTLE
[OL_0.5]
TAG = 'OPENLOOP'
TYPE = 'CONSTANT'
VALUE = 0.5
| 3. | Source the file in the Altair Driver File browser. |
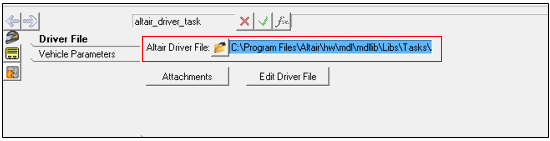
| 4. | The Edit driver file button can be used for editing the file. |
| 5. | Run the simulation  . . |
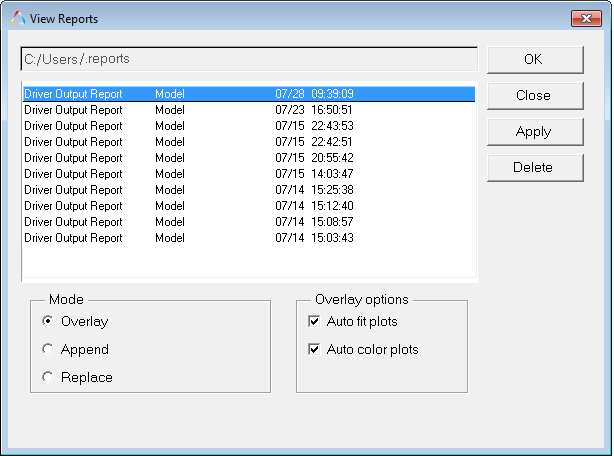
| 6. | After the simulation run is over and the solver creates h3d and plt files, click View Reports… for standard plots. |
| 7. | Select the recent run in the View Reports dialog and click OK. |
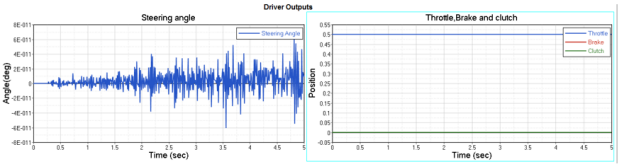
| 8. | The noise in the steering is numerical error of negligible magnitude – 0 for all practical purposes. Throttle is constant at 0.5 (driver throttle, brake and clutch outputs are normalized so, 50%) and brake is constant at 0. |
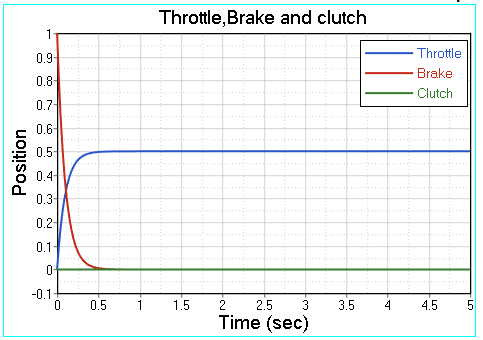
| 9. | Next let's try slightly different initial conditions. We will start the throttle at 0 and brake at 100%. Click the Edit Driver File button to open up the file editor. |
| 10. | Change the INITIAL_VALUE attribute in the THROTTLE_STANDARD block in the ADF, from 0.5 to 0. |
[THROTTLE_STANDARD]
MAX_VALUE = 1.0
MIN_VALUE = 0.00
SMOOTHING_FREQUENCY = 10.0
INITIAL_VALUE = 0.5 0
| 11. | Similarly, change the INITIAL_VALUE attribute in the BRAKE_STANDARD block in the ADF, from 0.0 to 1.0. |
[BRAKE_STANDARD]
MAX_VALUE = 1.0
MIN_VALUE = 0.0
SMOOTHING_FREQUENCY = 10.0
INITIAL_VALUE = 0.0 1.0
| 13. | Run the simulation and study the results. |
| 14. | Now, we see that throttle and brake start from respective initial values and step up to the controller outputs. The time taken to step up is roughly (5x1/SMOOTHING_FREQUENCY). |
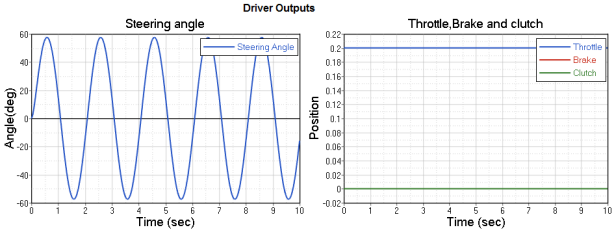
Example #2 Open Loop Sinusoidal Steering Event
In this example we will model a simple event with constant 20% throttle, constant 0% throttle and sinusoidal steering input with amplitude of 60 degrees (∏/3 radians) and frequency of 0.5 Hz.
| 1. | Open any text editor and copy/paste the following text into it. |
$-----------------------------------------------------------------ALTAIR_HEADER
[ALTAIR_HEADER]
FILE_TYPE = 'ADF'
FILE_VERSION = 1.0
FILE_FORMAT = 'ASCII'
$--------------------------------------------------------------------------UNITS
[UNITS]
(BASE)
{length force angle mass time}
'meter' 'newton' 'radians' 'kg' 'sec'
$--------------------------------------------------------------------VEHICLE_IC
[VEHICLE_INITIAL_CONDITIONS]
VX0 = -20.0
VY0 = 0.0
VZ0 = 0.0
$--------------------------------------------------------------STEERING_STANDARD
[STEER_STANDARD]
MAX_VALUE = 3.141593
MIN_VALUE = -3.141593
SMOOTHING_FREQUENCY = 10.0
INITIAL_VALUE = 0.0
$--------------------------------------------------------------THROTTLE_STANDARD
[THROTTLE_STANDARD]
MAX_VALUE = 1.0
MIN_VALUE = 0.00
SMOOTHING_FREQUENCY = 10.0
INITIAL_VALUE = 0.2
$---------------------------------------------------------------BRAKING_STANDARD
[BRAKE_STANDARD]
MAX_VALUE = 1.0
MIN_VALUE = 0.0
SMOOTHING_FREQUENCY = 10.0
INITIAL_VALUE = 0.0
$-----------------------------------------------------------------MANEUVERS_LIST
[MANEUVERS_LIST]
{ name simulation_time h_max print_interval}
'MANEUVER_1' 10.0 0.01 0.01
$---------------------------------------------------------------------MANEUVER_1
[MANEUVER_1]
$This block provides the ties controllers to each driver output
TASK = 'STANDARD'
(CONTROLLERS)
{DRIVER_SIGNAL PRIMARY_CONTROLLER ADDITIONAL_CONTROLLER}
STEER OL_STEER NONE
THROTTLE OL_THROTTLE NONE
BRAKE OL_BRAKE NONE
$---------------------------------------------------------OL_STEER.
$SIGNAL_CHANNEL tells the driver which solver variable in Signal Generator to over-ride
$with the EXPRESSION value. The EXPRESSION should be consistent with MOTIONSOLVE.
[OL_STEER]
TAG = 'OPENLOOP'
TYPE = 'EXPRESSION'
SIGNAL_CHANNEL = 0
EXPRESSION = 'DTOR(60)*SIN(2*PI*0.5*TIME)'
$---------------------------------------------------------OL_THROTTLE
[OL_THROTTLE]
TAG = 'OPENLOOP'
TYPE = 'CONSTANT'
VALUE = 0.2
$---------------------------------------------------------OL_BRAKE
[OL_BRAKE]
TAG = 'OPENLOOP'
TYPE = 'CONSTANT'
VALUE = 0.0
| 2. | Run the simulation and study the results. |
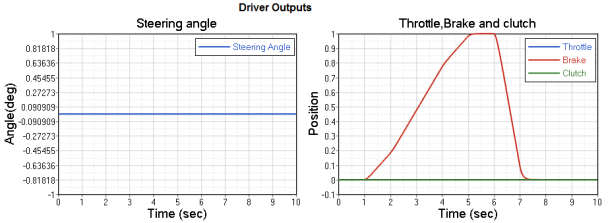
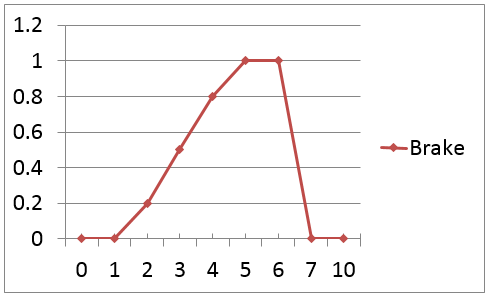
Example #3 Open Loop Curve Driven Braking Event
In this example we will model a simple event with braking signal as a curve.
| 1. | Open text editor and copy/paste the following text into it. |
$-----------------------------------------------------------------ALTAIR_HEADER
[ALTAIR_HEADER]
FILE_TYPE = 'ADF'
FILE_VERSION = 1.0
FILE_FORMAT = 'ASCII'
$--------------------------------------------------------------------------UNITS
[UNITS]
(BASE)
{length force angle mass time}
'meter' 'newton' 'radians' 'kg' 'sec'
$--------------------------------------------------------------------VEHICLE_IC
[VEHICLE_INITIAL_CONDITIONS]
VX0 = -20.0
VY0 = 0.0
VZ0 = 0.0
$--------------------------------------------------------------STEERING_STANDARD
[STEER_STANDARD]
MAX_VALUE = 3.141593
MIN_VALUE = -3.141593
SMOOTHING_FREQUENCY = 10.0
INITIAL_VALUE = 0.0
$--------------------------------------------------------------THROTTLE_STANDARD
[THROTTLE_STANDARD]
MAX_VALUE = 1.0
MIN_VALUE = 0.00
SMOOTHING_FREQUENCY = 10.0
INITIAL_VALUE = 0.0
$---------------------------------------------------------------BRAKING_STANDARD
[BRAKE_STANDARD]
MAX_VALUE = 1.0
MIN_VALUE = 0.0
SMOOTHING_FREQUENCY = 10.0
INITIAL_VALUE = 0.0
$-----------------------------------------------------------------MANEUVERS_LIST
[MANEUVERS_LIST]
{ name simulation_time h_max print_interval}
'MANEUVER_1' 10.0 0.001 0.01
$---------------------------------------------------------------------MANEUVER_1
[MANEUVER_1]
$This block provides the ties controllers to each driver output
TASK = 'STANDARD'
(CONTROLLERS)
{DRIVER_SIGNAL PRIMARY_CONTROLLER ADDITIONAL_CONTROLLER}
STEER OL_STEER NONE
THROTTLE OL_THROTTLE NONE
BRAKE OL_BRAKE NONE
$---------------------------------------------------------OL_STEER.
$SIGNAL_CHANNEL tells the driver which solver variable in Signal Generator to over-ride
$with the EXPRESSION value. The EXPRESSION should be consistent with MOTIONSOLVE.
[OL_STEER]
TAG = 'OPENLOOP'
TYPE = 'CONSTANT'
VALUE = 0.0
$---------------------------------------------------------OL_THROTTLE
[OL_THROTTLE]
TAG = 'OPENLOOP'
TYPE = 'CONSTANT'
VALUE = 0.0
$---------------------------------------------------------OL_BRAKE
[OL_BRAKE]
TAG = 'OPENLOOP'
TYPE = 'CURVE'
BLOCK = 'BRAKE_CRV'
$---------------------------------------------------------CURVE_DATA
[BRAKE_CRV]
INDEPENDENT_VARIABLE = 'TIME'
DEPENDENT_VARIABLE = 'BRAKE_SIGNAL'
INTERPOLATION = 'LINEAR'
{TIME BRAKE_SIGNAL}
0 0
1 0
2 0.2
3 0.5
4 0.8
5 1.0
6 1.0
7 0
10 0
| 2. | Run the simulation and study the results. |