|
»Click here to display Table of Contents«
|

Steer Controller |

|

|

|

|
|
Steer Controller |
|
|
|

|
|
»Click here to display Table of Contents«
|
Steer Controller |
|
|
|
|
|
Steer Controller |
|
|
|
|
The Steer Controller controls the vehicle path for various maneuvers. This controller outputs the steering wheel angle to the vehicle via a motion. A motsub user subroutine calculates the steering wheel angle based on feedback signals (which change with time) and the steering control parameters entered via the task wizard.
The Steer Controller data can be accessed from the Project Browser by clicking on the Steer controller data form (located under the analysis).
| Note | The Forms panel containing the steer controller data is automatically displayed. |
Click the expansion button ![]() (located on the right side of the Forms panel) in order to display the Steer controller data dialog. This dialog allows you to to view/access all of the steer controller data in the current analysis.
(located on the right side of the Forms panel) in order to display the Steer controller data dialog. This dialog allows you to to view/access all of the steer controller data in the current analysis.
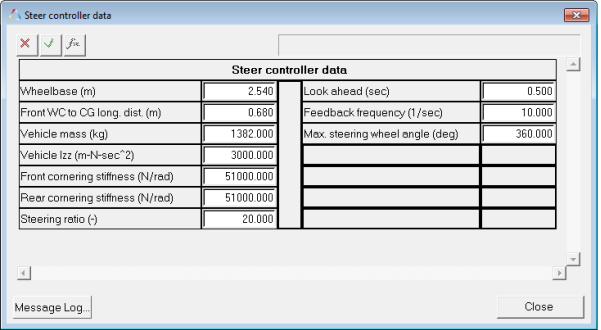
Steer controller data dialog
The steer controller data provides information about the vehicle to the controller. The controller then uses the data in a mathematical model of the vehicle to predict the future path of the vehicle.
A description of each steer controller parameter is provided below:
Wheelbase |
The longitudinal distance between the front and rear wheel centers. |
Front WC to CG long. dist. |
The longitudinal distance from the front wheel center to the vehicle’s center of mass. The center-of-mass position should include the affects of driver, passengers, and cargo carried by the vehicle. |
Vehicle mass |
The total mass of the vehicle including any cargo. |
Vehicle Izz |
The mass moment of Inertia of the vehicle about the vertical axis. The yaw inertia should include the driver, and any passengers or cargo carried by the vehicle. |
Front cornering stiffness |
The sum of the front tires' cornering stiffness. Cornering stiffness is the partial derivative of the lateral force with respect to slip angle at the tire’s nominal vertical load. |
Rear cornering stiffness |
The sum of the rear tires’ cornering stiffness. Cornering stiffness is the partial derivative of the lateral force with respect to slip angle at the tire’s nominal vertical load. |
Steering ratio |
The steering wheel angle needed to produce one unit of steer angle at the front wheels. The controller calculates the needed steer angle at the front wheels and multiplies this by the steering ratio to compute the steering wheel angle. |
Look ahead |
The look-ahead-time multiplied by the vehicle speed gives a distance ahead of the vehicle. The controller (using an internal model of the vehicle) predicts the future position of the vehicle at this distance ahead of its current position. The controller also determines a desired position at the distance-ahead based on the input path. The difference between predicted further position of the vehicle and the desired position is used to compute a steering correction. Smaller look-ahead-times may allow a vehicle to better follow input paths with larger curvatures, or quickly changing curvatures, but may also lead to undesired rapid changes in the steering wheel angle. Conversely, longer look-ahead-times produce a steering input that changes more slowly at the cost of the vehicle deviating from the desired path. For example, with a longer look-ahead-time the controller sees a curve in the path sooner and may begin to steer the vehicle while the path local to the vehicle is still straight. |
Feedback frequency |
The number of times a second the steering controller computes a new steering wheel angle. |
Maximum steering wheel angle |
The absolute value of the steering wheel angle output by the controller may not exceed this value. |