|
»Click here to display Table of Contents«
|

Constraint: Coupler |

|

|

|

|
|
Constraint: Coupler |
|
|

|

|
|
»Click here to display Table of Contents«
|
Constraint: Coupler |
|
|
|
|
|
Constraint: Coupler |
|
|
|
|
Model Element |
|
Description |
|
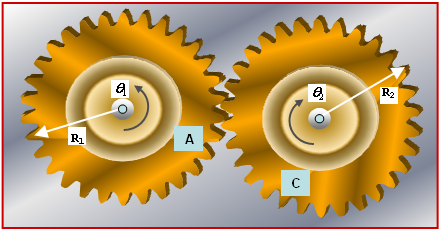
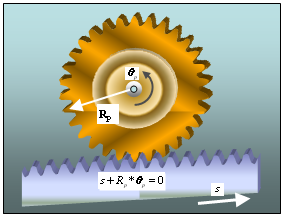
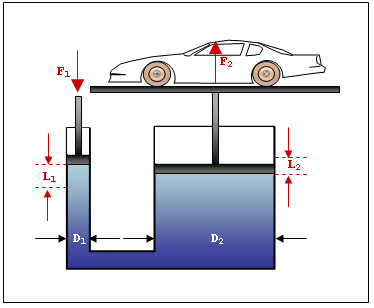
COUPLER defines an algebraic relationship between the degrees of freedom of two or three joints. This may be used to model idealized spur gears, rack and pinion gears, and differentials as simple constraints that relate the displacements in a set of joints. |
|
Declaration |
|
def COUPLER(id, LABEL="", JOINTS=[0, 0, 0], TYPE=[' ', ' ', ' '], SCALES=[0.0, 0.0, 0.0], FUNCTION="", ROUTINE="", INTERPRETER="", SCRIPT=""): |
|
Attributes |
|
id |
Element identification number (integer>0). This number is unique among all of the COUPLER elements. |
LABEL |
The name of the COUPLER element. |
JOINTS |
Specifies the list of ID's of the first, second, and third joints, respectively, whose degree of freedom is used to define the constraint relationship. |
TYPE |
Defines the freedom type that is being used for the respective joints. For translational and revolute joints, the choice is obvious. For cylindrical joints, the freedom type needs to be specified. "T" indicates that the translational degree of freedom in the joint is to be used. "R" indicates that the rotational degree of freedom in the joint is to be used. |
SCALES |
This defines the scale factors to be used in defining the constraint associated with a coupler. When only two joints are used to specify the coupler constraint, the ratio is given two real values. When three joints are used, the ratio must be provided with three real values. |
FUNCTION |
The list of parameters that are passed from the data file to the user defined subroutine. This attribute is common to all types of user subroutines and scripts. The name of the user subroutine depends on the type of the element. |
ROUTINE
|
Specifies an alternative name for the user subroutine. |
INTERPRETER |
Specifies the interpreted language that the user script is written in. Valid choices are MATLAB or PYTHON. |
SCRIPT |
Specifies the path and name of the user written script that contains the routine. |
Comments |
|
ExampleThe first example below demonstrates the COUPLER connecting a revolute and translational joint. COUPLER(1, LABEL="Coupler 0", JOINTS=[1,2], TYPE=['R','T'], SCALES=[1,2.5]) The second example below demonstrates the COUPLER connecting a revolute, translational, and cylindrical joint. COUPLER(2, LABEL="Coupler 2", JOINTS=[1,2,3], TYPE=['R','T','R'], SCALES=[1,2.5,3.7]) |
|
See Also:
The following MDL Model statements:
*SetCoupler() - asymmetric coupler pair
*SetCoupler() - asymmetric coupler with user subroutine
*SetCoupler() - single coupler
*SetCoupler() - single coupler with user subroutine
*SetCoupler() - symmetric coupler pair