|
»Click here to display Table of Contents«
|

Constraint: PTSF |

|

|

|

|
|
Constraint: PTSF |
|
|

|

|
|
»Click here to display Table of Contents«
|
Constraint: PTSF |
|
|
|
|
|
Constraint: PTSF |
|
|
|
|
Model Element |
|||||||||||||||||
Description |
|||||||||||||||||
Constraint_PTSF defines a higher pair constraint. A fixed point on one body slides on a surface that is fixed on a second body. The point is not allowed to lift off the surface. |
|||||||||||||||||
Format |
|||||||||||||||||
<Constraint_PTSF id = "integer" label = "Name of Constraint_PTSF element" i_marker_id = "integer" j_marker_id = "integer" [ disp_xo = "real" disp_yo = "real" disp_zo = "real" ] surface_id = "integer" > /> |
|||||||||||||||||
Attributes |
|||||||||||||||||
id |
Element identification number (integer>0). This number is unique among all Constraint_PTSF elements. |
||||||||||||||||
label |
The name of the Constraint_PTSF element. |
||||||||||||||||
i_marker_id |
Specifies a Reference_Marker that defines the connection on the first body. The origin of this Reference_Marker defines the point that is required to slide on the surface. The body containing this Reference_Marker may be a rigid body, a flexible body, or a point body. The parameter is mandatory. |
||||||||||||||||
j_marker_id |
Specifies a Reference_Marker that defines the the coordinate system in which the surface points are defined. The surface is defined on the body containing this Reference_Marker and moves with this body. The body containing the curve must be a rigid body or a point body. The parameter is mandatory. |
||||||||||||||||
disp_x0 disp_y0 disp_z0 |
Defines a guess for the initial contact point on the surface. The coordinates are measured with respect to j_marker_id and are defined in its coordinate system. The parameter is optional. See Comment 2 for how this data is used. |
||||||||||||||||
Comments |
|||||||||||||||||
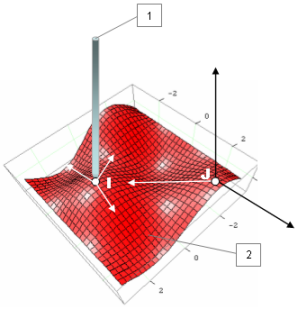
The surface is represented parametrically using a Constraint_ParamSurface object. The surface points are defined with respect to the origin of Reference_Marker J. The coordinates are measured in the coordinate system associated with Reference_Marker J. The surface is required to be fixed with respect to Body 2. The origin of Reference_Marker I defines a fixed point on Body 1. Body 1 may be any kind of body – Body_Rigid, Body_Flexible or Body_Point.
An illustration of a Point-on-Curve constraint
MotionSolve finds the nearest point on the curve P to P0. The initial point on the curve is used to calculate an initial value of the surface parameters u0 and v0. An iterative process is used.
Calculation of the initial contact point P(u0, v0)
|
|||||||||||||||||
Example |
|||||||||||||||||
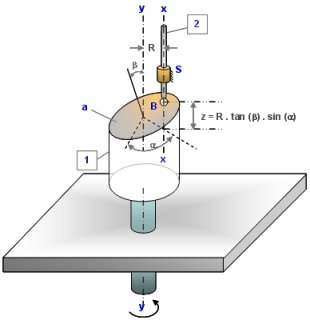
The image below shows a spatial cam-type sine generator. Slide cam 1 rotates about a fixed axis y-y and has a plane working surface 'a' whose normal makes an angle β with the axis y-y. Follower 2 slides in a fixed guide S whose axis x-x is parallel to the axis y-y. Follower 2 carries a ball B of small radius in a holder (not shown) fixed to the follower. When cam 1 is turned by an angle α, the point of contact of ball B with the surface 'a' is displaced by the distance. z = R . tan (β) . sin (α) R is the distance between the axes y-y and x-z. Thus, the displacement of follower 2 is proportional to the sine of the angle α, the angle of rotation of the cam. For the purposes of this example, assume the following:
A spatial cam sine generator The Constraint_PTSF object for the above system is: <Constraint_PTSF id = "1" Label = “Advanced Joint Name” i_marker_id = "2101" j_marker_id = "1101" disp_xo = "100.0" disp_yo = "0.0" disp_zo = "0.0" surface_id = "11" /> |
|||||||||||||||||
Model Element |
|
Description |
|
PTSF defines a higher pair constraint. A fixed point on one body slides on a surface that is fixed on a second body. The point is not allowed to lift off the surface. |
|
Declaration |
|
def PTSF(id, LABEL="", I=0, SURFACE=0, RM=0, DISP=[0.0, 0.0, 0.0]): |
|
Attributes |
|
id |
Element identification number (integer>0). This number is unique among all the PTSF elements. |
LABEL |
The name of the PTSF element. |
I |
Specifies the ID of a fixed marker that defines the connection on the first body. The origin of this marker defines the point that is required to slide on the surface. The body containing this marker may be a rigid body, a flexible body or a point body. The parameter is mandatory |
SURFACE |
Specifies the ID of the surface that is fixed to the second body. |
RM |
Specifies the ID of a marker that defines the coordinate system in which the surface points are defined. The surface is defined on the body containing this marker and moves with this body. The body containing the surface must be a rigid body or a point body. The parameter is mandatory. |
DISP |
Defines a guess for the initial contact point on the surface. The coordinates are measured with respect to ICM. This parameter is optional. |
CommentsSee Constraint_PTSF |
|
ExampleThe example below shows how a PTSF may be defined.PTSF(1,LABEL="PTSF Name",I=2101, SURFACE=11,RM=1101,DISP=[100,0,0]) |
|
*PointToSurfaceJoint() (MDL Model statement)