|
»Click here to display Table of Contents«
|

Constraint: SFSF |

|

|

|

|
|
Constraint: SFSF |
|
|

|

|
|
»Click here to display Table of Contents«
|
Constraint: SFSF |
|
|
|
|
|
Constraint: SFSF |
|
|
|
|
Model Element |
|||||||||||||||||||||
Description |
|||||||||||||||||||||
Constraint_SFSF defines a higher pair constraint. The constraint consists of a surface on one body rolling and sliding on a surface on a second body. The surfaces are required to have a unique contact point. |
|||||||||||||||||||||
Format |
|||||||||||||||||||||
<Constraint_SFSF id = "integer" label = “Name of Constraint_SFSF element” i_marker_id = "integer" i_surface_id = "integer" i_disp_x0 = "real" i_disp_y0 = "real" i_disp_z0 = "real" j_marker_id = "integer" j_surface_id = "integer" j_disp_x0 = "real" j_disp_y0 = "real" j_disp_z0 = "real" </Constraint_SFSF> |
|||||||||||||||||||||
Attributes |
|||||||||||||||||||||
id |
Element identification number (integer>0). This number is unique among all Constraint_SFSF elements. |
||||||||||||||||||||
label |
The name of the Constraint_SFSF element. |
||||||||||||||||||||
i_marker_id |
Specifies a marker that defines the coordinate system in which the i_surface points are defined. It also implicitly defines the body on which the surface is "etched". The surface moves with the body. i_marker_id may belong to any type of body: flexible, rigid, or point. The parameter is mandatory. |
||||||||||||||||||||
i_surface_id |
Specifies the ID of the Reference_ParamSurface that contains the surface definition. |
||||||||||||||||||||
i_disp_x0 i_disp_y0 i_disp_z0 |
These three parameters specify the location of the contact point on i_surface at the input configuration as measured in the i_marker_id coordinate system. The three parameters come as a set. All three must be specified or none may be defined. These parameters are optional. See Comment 8 for more details. |
||||||||||||||||||||
j_marker_id |
Specifies a Reference_Marker that defines the coordinate system in which the j_surface points are defined. It also implicitly defines the body on which the surface is "etched". The surface moves with the body. j_marker_id may belong to any type of body: flexible, rigid, or point. The parameter is mandatory. |
||||||||||||||||||||
j_surface_id |
Specifies the ID of the Reference_ParamSurface that contains the surface definition. |
||||||||||||||||||||
j_disp_x0 j_disp_y0 j_disp_z0 |
These three parameters specify the location of the contact point on j_surface at the input configuration as measured in the j_marker_id coordinate system. The three parameters come as a set. All three must be specified or none may be defined. These parameters are optional. See Comment 8 for more details. |
||||||||||||||||||||
Comments |
|||||||||||||||||||||
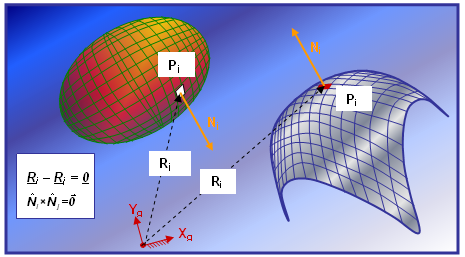
This is shown schematically in Figure 2 below. Pi and Pj represent the contact point on the two surfaces I and J respectively. Ni and Nj are the normals at the contact point for Surface I and Surface J respectively. The contact conditions are shown mathematically in the box at the bottom-left.
The contact condition between two surfaces
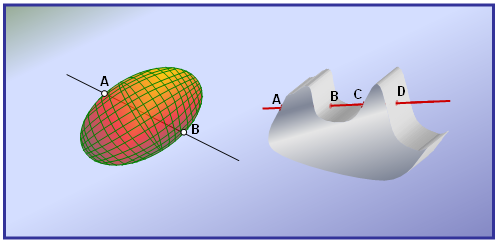
Convex and Non-Convex surfaces
|
|||||||||||||||||||||
Example |
|||||||||||||||||||||
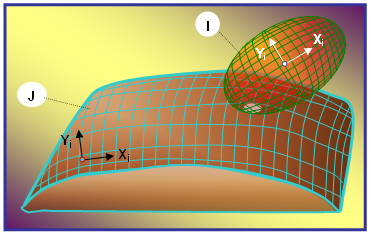
Figure 1 below shows two surfaces I and J that are in continuous contact.
Surface-to-Surface Contact Surface I is defined with respect to Reference_Marker 1023; surface J is defined with respect to Reference_Marker 2046. Reference_ParamSurface 123 defines surface I and Reference_ParamSurface 246 defines surface J. The patch containing the contact point is also shown in figure 1. An initial guess for the contact point on both surfaces is defined. Assume the initial contact point location on surface J, as measured in the coordinate system of 2046, is [1.466, 5.66, 0.1]. Assume the contact point location on surface I, as measured in the coordinate system of 1023, is [-0.522, -0.852, -0.453]. The Constraint_SFSF object may be defined as follows: <Constraint_SFSF id = "1" i_marker_id = "1023" i_surface_id = "123" i_disp_x0 = "1.466" i_disp_y0 = "5.66" i_disp_z0 = "0.1" j_marker_id = "2046" j_surface_id = "246" j_disp_x0 = "-0.522" j_disp_y0 = "-0.852" j_disp_z0 = "-0.452" > </Constraint_SFSF> |
|||||||||||||||||||||
Model Element |
|
Description |
|
SFSF defines a higher pair constraint. The constraint consists of a surface on one body rolling and sliding on a surface on a second body. The surfaces are required to have a unique contact point. |
|
Declaration |
|
def SFSF(id, LABEL="", ISURFACE=0, IRM=0, JSURFACE=0, JRM=0, IDISP=[0.0,0.0,0.0], JDISP=[0.0,0.0,0.0]): |
|
Attributes |
|
id |
Element identification number (integer>0). This number is unique among all the SFSF elements. |
LABEL |
The name of the SFSF element. |
ISURFACE |
Specifies the ID of the surface that is fixed to the first body. |
IRM |
Specifies the ID of a fixed marker that defines the coordinate system in which the ISURFACE points are defined. It also implicitly defines the body on which the surface is "etched". The surface moves with the body. |
JSURFACE |
Specifies the ID of the surface that is fixed to the second body. |
JRM |
Specifies the ID of a fixed marker that defines the coordinate system in which the JSURFACE points are defined. It also implicitly defines the body on which the surface is "etched". The surface moves with the body. |
IDISP |
These three parameters specify the location of the contact point on ISURFACE at the input configuration as measured in the IRM coordinate system.The three parameters come as a set. All three must be specified or none may be defined.These parameters are optional. |
JDISP |
These three parameters specify the location of the contact point on JSURFACE at the input configuration as measured in the JRM coordinate system. The three parameters come as a set. All three must be specified or none may be defined.These parameters are optional. |
CommentsSee Constraint_SFSF |
|
ExampleThe example below shows how a SFSF may be defined.SFSF(1,LABEL="SFSF", ISURFACE=123,IRM=1023, JSURFACE=246,JRM=2046,IDISP=[1.466,5.66,0.1], JDISP=[-0.522,-0.852,-0.453]) |
|
See Also:
*SurfaceToSurfaceJoint() (MDL Model statement)