|
»Click here to display Table of Contents«
|

CSEAM |

|

|

|

|
|
CSEAM |
|
|

|

|
|
»Click here to display Table of Contents«
|
CSEAM |
|
|
|
|
|
CSEAM |
|
|
|
|
Bulk Data Entry
CSEAM – Seam Weld Element Connection
Description
Define a seam weld connecting two shell surfaces.
Format
(1) |
(2) |
(3) |
(4) |
(5) |
(6) |
(7) |
(8) |
(9) |
(10) |
CSEAM |
EID |
PID |
SMLN |
CTYPE |
IDAS |
IDBS |
IDAE |
IDBE |
|
|
GS |
GE |
|
|
|
|
|
|
|
|
Alternate Format
(1) |
(2) |
(3) |
(4) |
(5) |
(6) |
(7) |
(8) |
(9) |
(10) |
CSEAM |
EID |
PID |
SMLN |
CTYPE |
IDAS |
IDBS |
IDAE |
IDBE |
|
|
XS |
YS |
ZS |
XE |
YE |
ZE |
|
|
|
|
Field |
Contents |
EID |
Unique element identification number. No default (Integer > 0) |
PID |
A PSEAM entry identification number. No default (Integer > 0) |
SMLN |
Seam line identification number (Comment 2). No default (Maximum eight characters) |
CTYPE |
Character string indicating how the connection is defined. Either format connects up to 3 x 3 quadrilateral shell elements per patch (possibly more for triangular elements). For PSHELL type, the connection of surface patch to surface patch is defined by specifying the property identification numbers. For ELEM type, the connection of surface patch to surface patch is defined by specifying element identification numbers. |
IDAS, IDBS |
Used to define the two connecting patches or the start parts of patch A and patch B. If CTYPE=PSHELL, then IDAS and IDBS refer to the property identification numbers of patch A and patch B. If CTYPE=ELEM, then IDAS and IDBS refer to the element identification numbers of patch A and patch B. Integer > 0, IDAS ≠ IDBS. |
IDAE, IDBE |
Used to define the end parts of patch A and patch B. If CTYPE=PSHELL, IDAE and IDBE could be zero. If they are not zero, then IDAE and IDBE refer to the property identification numbers of the end parts of patch A and patch B. They could be used to define a tailored blank model. If CTYPE=ELEM, IDAS and IDBS refer to the element identification numbers of the end parts of patch A and patch B. |
GS |
Identification number of a grid point which defines the start location of the connector. No default (Integer > 0) |
GE |
Identification number of a grid point which defines the end location of the connector. No default (Integer > 0) |
XS, YS, ZS |
Coordinates of point that defines the start location (GS) of the seam weld in the basic coordinate system. (Real) |
XE, YE, ZE |
Coordinates of point that defines the end location (GE) of the seam weld in the basic coordinate system. (Real) |
| 1. | CSEAM defines a flexible connection between two surface patches. With all of the information provided, a fictitious 8-node CHEXA will be generated internally for a CSEAM, and the eight corner nodes are all constrained by the grids of corresponding shell elements. Then the element stiffness of this fictitious CHEXA will be transferred to the corresponding shell grids. The CSEAM element itself does not hold any independent DOF. See the figure below: |
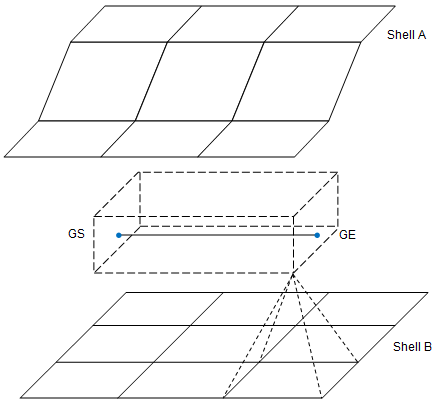
A CSEAM element connects Shell A and Shell B. A fictitious hexa is generated for the CSEAM, and the corner nodes of the hexa are all constrained by corresponding shell grids. To have a clear view, only one of this kind of constraint relationship is shown with dotted lines.
| 2. | In the SMLN entry, a name can be given for the CSEAM element. If one CSEAM's GS or GE is common to the GS or GE of the other CSEAM and they have the same SMLN, the two CSEAM elements are regarded as neighbors. For two neighboring CSEAM elements, the faces of the internally generated CHEXAs will be adjusted to form a single common face. |
A seam line does not have a branch with the same SMLN,
| 3. | The distance between GS and GE is the length of the element. The width of the seam weld is defined in the PSEAM card as W. It is measured perpendicular to the length and lies in the plane of Shell A or B. |
| 4. | Building the connectivity for CSEAM. |
Since the geometry for finding the correct projection could be various and complicated, many geometry related checks will be implemented in the following procedure. The default projection algorithm and checking rules can be modified to some extent via changing the default value defined in the SWLDPRM card.
To build the connectivity, at first, project GS on Shell A and B; the projection points are denoted as SA and SB, respectively. This is also true for GE, and the projection points are denoted as EA and EB. SA, SB, EA and EB are also called piercing points. Meanwhile, the shell elements supporting these piercing points are denoted as EIDSA, EIDSB, EIDEA and EIDEB.
Take SA as an example. For ELEM type, the program will try to project GS on the user specified element; if the piercing point falls inside the element, the program will accept it and move to find the next piercing point. If the piercing point falls outside the element but within the tolerance defined by PROJTOL in the SWLDPRM card, the program will still accept it. Otherwise, an error will be issued for this CSEAM element, and the program continues to process other CSEAM elements. For PSHELL type, the case could be much more complicated. First, a bunch of shell elements which are the closest ones to GS and have the user-specified shell property will be selected as candidates. Then project GS on each of the candidates. If the piercing point falls inside one of the candidates, the program will accept it and move to find the next one. After looping all the candidates, if there is no appropriate one to support the piercing point, the tolerance defined by PROJTOL will be used and all candidates will be searched again. At last, if still no element is found to support the piercing point, an error will be issued for this CSEAM, and the program continues to process other CSEAM elements. In this way, all the four piercing points and elements supporting them are found, or an error is issued.
If GMCHK > 0 (be defined in the SWLDPRM card), various geometry checks will be implemented at specific steps.
If GMCHK > 0 and GSPROJ > 0.0 (be defined in the SWLDPRM card), the program will check the angle between the normal vectors of EIDSA and EIDSB, and the angle between the normal vectors of EIDEA and EIDEB. If the angle is larger than GSPROJ, an error will be issued for this CSEAM. If GSTOL > 0.0 (be defined in the SWLDPRM card) and one of the lengths of GS-SA, GS-SB, GE-EA and GE-EB is larger than GSTOL, an error will be issued. Besides these basic checks, a group of cutout and span checks will be performed if GMCHK>0.
After the four piercing points are found, the auxiliary points will then need to be located with the definition of the seam width. Take SA as an example, with the coordinates of the piercing point, the supporting element EIDSA and the seam weld width W, you can define the following vector n × GS-GE where n is the normal vector of EIDSA. Through SA, two points SA1' and SA2' can be defined along this vector and |SA1'-SA2'| = W. SA1' and SA2' are called the preliminary auxiliary points. For a curved or folded shell patch, the preliminary points may not lie on the shell surface. Therefore, a second projection is needed to find the final auxiliary points. Take SA1' as an example. First, a group of candidate elements needs to be collected. They are composed of shell elements surrounding EIDSA. SA1' will be projected on each of the candidates to find the best one to support the projection point. If no element with the user specified shell property is found with/without tolerance, elements with different shell property will be supplemented to the candidate list. After projecting all the eight preliminary auxiliary points on the shell surfaces, the number of good auxiliary points will be counted. If all of the eight auxiliary points and corresponding shell elements are successfully located, the building of the connectivity for this CSEAM succeeds. Otherwise, GSMOVE defined in the SWLDPRM card will be implemented to avoid the failure if GSMOVE > 0.
When collecting candidate shell elements which will be used to support the auxiliary points, the angle between the normal vector of the shell element and the thickness direction of the fictitious CHEXA will be checked. If the angle is larger than GSPORJ, this shell element will not be considered as a candidate. If EIDSA, EIDSB, EIDEA or EIDEB fails the check, a warning message will be issued. For curved or folded shell surface, shell elements on it have more chances to be eliminated from the candidate list, thus may possibly induce the failure of locating all auxiliary points. One remedy to this problem is to increase the value of GSPORJ to include more shell elements into the candidate list.
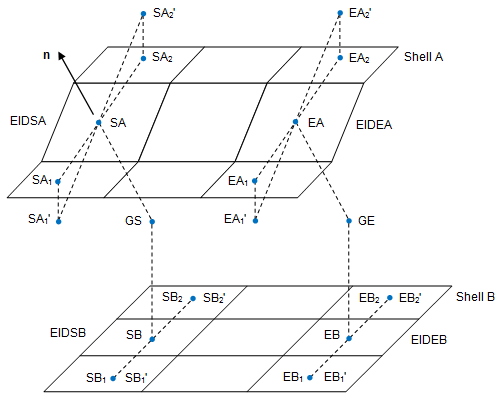
Various projection points generated in building the connectivity for a CSEAM element.
| 5. | When building the connectivity for CSEAM, if not all eight auxiliary points can be found and GSMOVE > 0, GS or/and GE will be moved by W/2 and re-projected to avoid the failure. This often happens near the mesh boundary. |
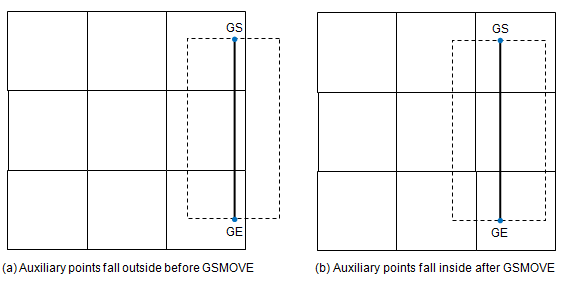
Both GS and GE are moved by W/2 to find correct projection.
| 6. | For PSHELL type CSEAM, when the GS or GE is close to a folded or curved part of a shell surface, the program has more chances to fail in locating the correct element to support the piercing points because of multiple possible choices. In this case, using ELEM type to directly specify the elements for projection would be a wise alternative. |
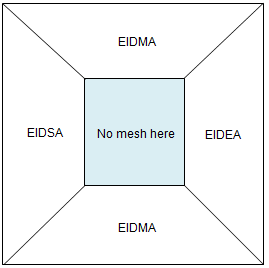
| 7. | Check whether the CSEAM spans a cutout or spans more than three shell elements on each shell surface when GMCHK > 0. |
Take EIDSA and EIDEA as an example.
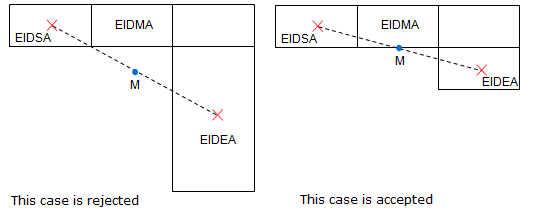
| • | If EIDSA = EIDEA, the seam lies on the same element on this surface. This case is accepted. |
| • | If EIDSA ≠ EIDEA and they share at least one common grid, it is necessary to do some checks. |
(In the following check, an element called EIDMA is used to assist the check. EIDMA is located on the same shell surface where EIDSA and EIDEA are located. It shares one of the common grids shared by EIDSA and EIDEA. EIDMA could be multiple.)
| a) | If EIDSA and EIDEA share only one common grid but no EIDMA is found, then this case is rejected. |
This case is rejected.
| b) | If EIDSA and EIDEA share only one common grid and at least one EIDMA is found, the number of free edges will be counted. The following cases are considered. |
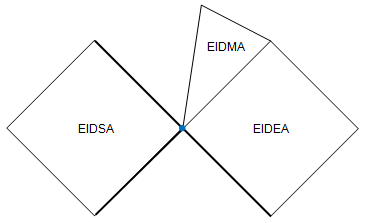
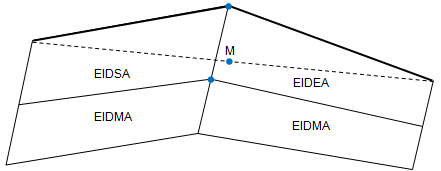
If there are three or more free edges (bold lines), this case is rejected.
Angle check.
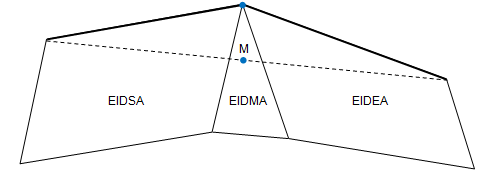
Projection check. M is the middle point of the two free edges' ends.
If there are two free edges, the angle (α) between the free edges will be calculated. If the angle is larger than CNRAGLI (be defined in the SWLDPRM card), this case is accepted. If the angle is smaller than CNRAGLI, then you project the mid-point M to EIDSA, EIDEA and EIDMA, if the projection point falls inside, this case is still accepted. Or it will be rejected.
If there is only one free edge, this case is accepted.
If there is no free edge, this case is accepted.
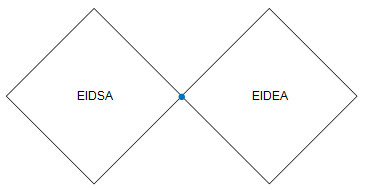
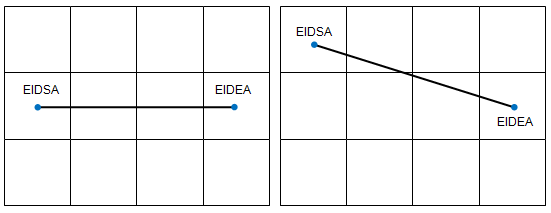
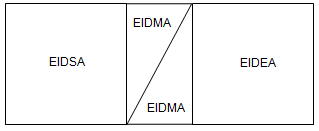
| c) | If EIDSA and EIDEA share two common grids, that means EIDSA and EIDEA share a common edge. Before accepting this case, it is still necessary to check the angle or project the middle point M. |
Angle check.
Projection check. M is the middle point of the two free edges' ends.
Compare the angle (α) with CNRAGLO even EIDSA and EIDEA share an edge. If the angle is larger than CNRAGLI, this case is accepted. If the angle is smaller than CNRAGLI, then you project the mid-point M to EIDSA and EIDEA, if the projection point falls inside, this case is still accepted. Or it will be rejected.
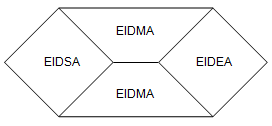
| • | If EIDSA ≠ EIDEA and they share no one common grid, it is necessary to check the elements around them and check how these elements are connected with EIDSA and EIDEA. |
(In the following check, EIDMA is re-defined as an element which shares at least one grid respectively with EIDSA and EIDEA)
| a) | If there is no EIDMA, this means the CSEAM element spans more than three elements in the current shell surface, and this case is rejected. |
This case is rejected.
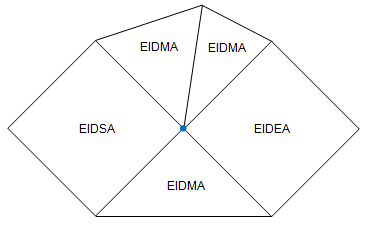
| b) | If there are three EIDMA which share edges with both EIDSA and EIDEA, this case is accepted. |
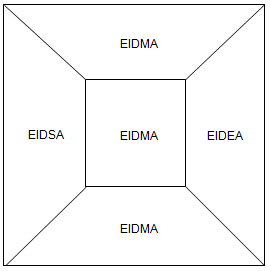
This case is accepted.
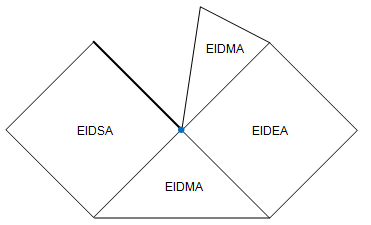
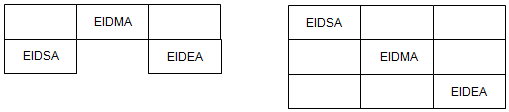
| c) | If there are two EIDMA which share edges with both EIDSA and EIDEA, it is necessary to check whether the two EIDMA share a common edge or not. If the two EIDMA do not share a common edge, there is a cutout and this case is rejected. |
|
|
If the two EIDMA do not share a common edge, there is a cutout and this case is rejected. |
If the two EIDMA share a common edge, this case is accepted. |
Two different cases when there are two EIDMA who share edges with both EIDSA and EIDEA.
| d) | If there is only one EIDMA which shares edges with both EIDSA and EIDEA. The check presented in the following figure needs to be implemented. |
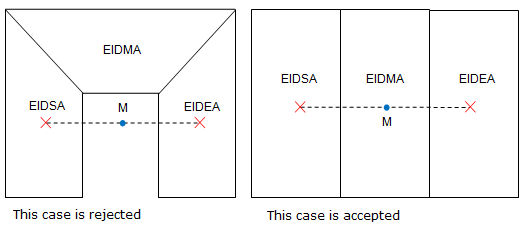
Point M is the average of the two piercing points, that is SA and EA. If the projection from point M on EIDMA falls inside this element, this case is accepted, or it will be rejected.
| e) | If there is only one EIDMA which shares one edge with EIDSA and shares a corner with EIDEA (or shares one corner with EIDSA and shares one edge with EIDEA), the same check implemented for the last case will be adopted. |
| f) | If the projection from point M on EIDMA falls inside this element, this case is accepted, or it will be rejected. |
| g) | If there are two EIDMA and each of them shares an edge with EIDSA or EIDEA and shares a corner with EIDEA or EIDSA, this case is accepted. |
This case is accepted.
| h) | If there is only EIDMA which shares only corners but no edge with EIDSA or EIDEA, this case is rejected. |
These two cases are rejected. For the one on the right, although there is no cutout on the surface, but EIDMA is not fully constrained (only two corners are constrained) by the CSEAM. Therefore, this case is still rejected.
For EIDSB and EIDEB, the same cutout/span check applies.
All the cutout/span checks introduced here still cannot cover 100% cases, but they can spot most of the bad cases that will lead to unreal modeling of the seam weld. Thus, it is recommended to turn on the cutout/span check (GMCHK > 0) to exam the seam weld model in the first round. After all possible problems are resolved, then start the final run.
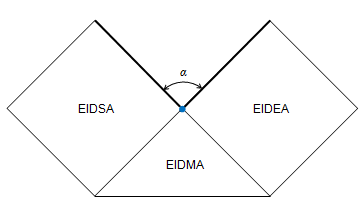
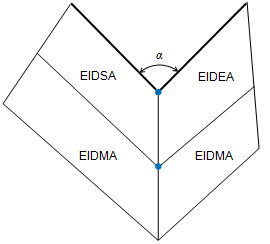
| 8. | Check whether the CSEAM spans a corner on each shell surface when GMCHK > 0. |
Take EIDSA and EIDEA as an example. The angle between the normal vectors of the two elements should not larger than the value of CNRAGLO (be defined in the SWLDPRM card) as shown in the following figure. The same check applies to EIDSB and EIDEB. This prevents generating single CSEAM element across a very curved shell configuration.
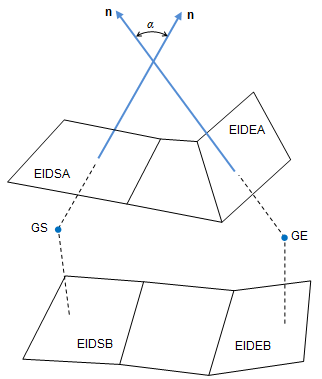
If α > CNRAGLO, this CSEAM element is rejected.
| 9. | Diagnostic print outs, checkout runs and non-default setting of search and projection parameters are requested on the SWLDPRM bulk data entry. |
| 10. | It is possible to visualize the fictitious CHEXA via setting SHOWAUX = 1 in the SWLDPRM card. To have the fictitious CHEXA and corresponding results output into the H3D file, one also needs to set SHOWAUX = 1. |
| 11. | It is recommended to start with default settings and turn on the full geometry check by setting GMCHK=1 or 2. With the full geometry check, most of the unexpected cases which may possibly induce unreasonable projections can be spotted. If the switch for outputting diagnostic info, that is PRTSW, is turned on, the connectivity detail of each CSEAM element will be printed in the .out file. Also, a summary of various geometry data will be printed after all CSEAM elements are gone through by the program. They will be very useful for debugging the seam weld model. |
| 12. | Seam weld elements are ignored in heat transfer analysis. |
See Also: