|
»Click here to display Table of Contents«
|

Force: Spring Damper |

|

|

|

|
|
Force: Spring Damper |
|
|

|

|
|
»Click here to display Table of Contents«
|
Force: Spring Damper |
|
|
|
|
|
Force: Spring Damper |
|
|
|
|
Model Element |
|||||||||||||||
Description |
|||||||||||||||
Force_SpringDamper defines a spring damper force acting between two Reference_Markers. The element can be translational (applies a force) or rotational (applies a torque). In both cases, the force is characterized by a stiffness coefficient, a damping coefficient, a free-length and a preload. |
|||||||||||||||
Format |
|||||||||||||||
<Force_SpringDamper id = "integer" [ label = "string" ] i_marker_id = "integer" j_marker_id = "integer" type = { "TRANSLATIONAL" | "ROTATIONAL" } stiffness = "real" damping = "real" length = "real" preload = "real" > </Force_SpringDamper> |
|||||||||||||||
Attributes |
|||||||||||||||
id |
Element identification number (integer > 0). This number is unique among all Force_SpringDamper elements. |
||||||||||||||
label |
The name of the Force_SpringDamper element. |
||||||||||||||
i_marker_id |
Specifies the Reference_Marker at which the force or torque is applied. This is designated as the point of application of the force. |
||||||||||||||
j_marker_id |
Specifies the Reference_Marker at which the reaction force or torque is applied. This is designated as the point of application of the reaction force. |
||||||||||||||
type |
Specifies the type of Force_SpringDamper. Select from "TRANSLATIONAL" and "ROTATIONAL". "TRANSLATIONAL": Implies that the element applies a force between the two Reference_Markers. No torque is applied. "ROTATIONAL": Implies that the element applies a torque between the two Reference_Markers. No force is applied. |
||||||||||||||
stiffness |
Specifies the spring stiffness. For translational spring-dampers, this has units of force/unit translational deflection. For rotational spring-dampers, this has units of torque/radian. Note that stiffness > 0. A negative value is not allowed. |
||||||||||||||
damping |
Specifies the damping coefficient. For translational spring-dampers, this has units of force/unit translational deflection velocity. For rotational spring-dampers, this has units of torque/unit angular deflection velocity. Note that damping > 0. A negative value is not allowed. |
||||||||||||||
length |
Specifies the free-length or the installed (reference) length of the spring. Note that length > 0. A zero or negative value is not legal. |
||||||||||||||
preload |
Specifies any assembly or pre-load in the spring-damper. This is the force or torque when the distance or angle between the I and J markers is equal to the value specified by length. A positive value implies a force that tends to increase the distance or a torque that tends to increase the angle (repulsive), and vice versa. |
||||||||||||||
Comments |
|||||||||||||||
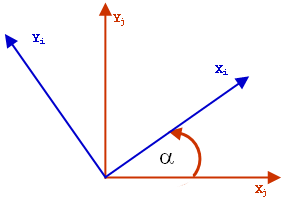
The convention used for measuring angles
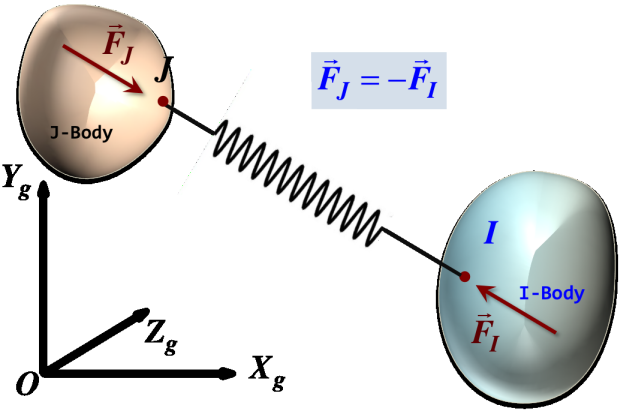
Force law for a translational spring-damper
|
|||||||||||||||
Example |
|||||||||||||||
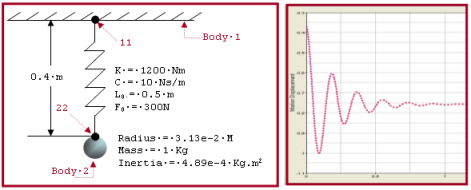
The first example shows how to model a translational spring damper. Assume a spherical steel ball of radius 0.0313m (approximately 3 cm) is suspended from the ceiling by a spring damper. The ball has a mass of 1 Kg, and inertia Ixx=Iyy=Izz=4.89E-4 Kg.m2. The spring properties are as follows:
The ball is pushed vertically up until its attachment to the spring is at a distance of 0.4m from the ceiling. The ball is then let loose, and it starts oscillating. The model is shown schematically in Figure 1. Also shown are sample results for the oscillatory motion of the ball.
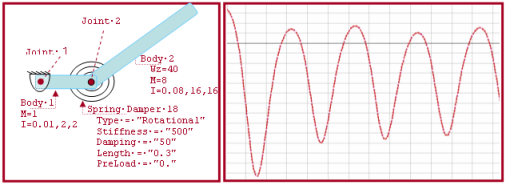
A simple translational spring damper system and its response The Force_SpringDamper modeling element for this scenario is: < Force_SpringDamper id = "18" i_marker_id = "22" j_marker_id = "11" type = "TRANSLATIONAL" stiffness = "1200" damping = "10" length = "0.5" preload = "300" > </ Force_ SpringDamper > The image below illustrates the use of a rotational spring damper that acts on the second revolute joint of a two link (double) pendulum. An initial angular velocity of 40 rads/sec sets the system in motion. The spring-damper parameters are shown in the image. The plot shows the torque generated by the spring-damper.
A rotational spring damper system and its response The rotational spring-damper definition for this model is: <Force_SpringDamper id = "18" i_marker_id = "1029" j_marker_id = "1039" type = "ROTATIONAL" stiffness = "500" damping = "50" length = "0.3" preload = "0." > </ Force_SpringDamper > |
|||||||||||||||
Model Element |
|
Description |
|
SPRINGDAMPER defines a spring damper acting between two markers. The element can be translational (applies a force) or rotational (applies a torque). In both cases, the force is characterized by a stiffness coefficient, a damping coefficient, a free-length, and a preload |
|
Declaration |
|
def SPRINGDAMPER(ID, LABEL="", I=0, J=0, TYPE="", C=0.0, CT=0.0, K=0.0, KT=0.0, FORCE=0.0, TORQUE=0.0, LENGTH=0.0, ANGLE=0.0): |
|
Attributes |
|
id |
Element identification number (integer>0). This number is unique among all the SPRINGDAMPER elements. |
LABEL |
The name of the SPRINGDAMPER element. |
I |
Specifies the ID of the marker at which the force or torque is applied. This is designated as the point of application of the force. |
J |
Specifies the ID of the marker at which the reaction force or torque is applied. This is designated as the point of reaction of the force. |
TYPE |
Specifies the type of SPRINGDAMPER. Select from "TRANSLATIONAL" and "ROTATIONAL"."TRANSLATIONAL": Implies that the element applies a force between the two markers. No torque is applied."ROTATIONAL": Implies that the element applies a torque between the two markers. No force is applied. |
C |
Specifies the translational damping coefficient. This has units of force/unit translational deflection velocity. |
CT |
Specifies the rotational damping coefficient. This has units of torque/unit angular deflection velocity. |
K |
Specifies the translational spring stiffness. This has units of force/unit translational deflection. |
KT |
Specifies the rotational spring stiffness. This has units of torque/unit rotational deflection. |
FORCE |
Specifies the pre-load in the SPRINGDAMPER.This is the force when the distance between the I and J markers is equal to the value specified by LENGTH. A positive value implies a force that tends to increase the distance and vice versa. |
TORQUE |
Specifies the pre-load in the SPRINGDAMPER.This is the torque when the angle between the I and J markers is equal to the value specified by ANGLE. A positive value implies a torque that tends to increase the angle (repulsive), and vice versa. |
LENGTH |
Specifies the free length of the spring. |
ANGLE |
Specifies the free angle of the spring. |
CommentsSee Force_SpringDamper |
|
ExampleThe example below shows how a translational SPRINGDAMPER may be defined.SPRINGDAMPER(18,LABEL="SpringDamper0",I=22,J=11,TYPE="TRANSLATION",C=10,K=1200,FORCE=300,LENGTH=0.5)
The example below shows how a rotational SPRINGDAMPER may be defined.SPRINGDAMPER(18,LABEL="SpringDamper1",I=1029,J=1039,TYPE="ROTATION",CT=50,KT=500,TORQUE=0,ANGLE=0.3) |
|
The following MDL Model statements:
*SetCoilSpring() - asymmetric coil spring pair
*SetCoilSpring() - asymmetric coil spring pair with user subroutine
*SetCoilSpring() - single coil spring
*SetCoilSpring() - single coil spring with user subroutine
*SetCoilSpring() - symmetric coil spring pair
*SetTorsionSpring() - asymmetric torsion spring pair
*SetTorsionSpring() - asymmetric torsion spring pair with user subroutine
*SetTorsionSpring() - single torsion spring
*SetTorsionSpring() - single torsion spring with user subroutine