|
»Click here to display Table of Contents«
|

Force: Bushing |

|

|

|

|
|
Force: Bushing |
|
|

|

|
|
»Click here to display Table of Contents«
|
Force: Bushing |
|
|
|
|
|
Force: Bushing |
|
|
|
|
Model Element |
|
Description |
|
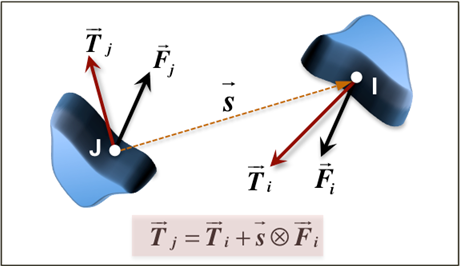
BUSHING defines a linear force and torque acting between two markers, I and J. |
|
Declaration |
|
def BUSHING(id, LABEL="", I=0, J=0, C=[], CT=[], K=[], KT=[], FORCE=[], TORQUE=[]): |
|
Attributes |
|
id |
Element identification number (integer>0). This number is unique among all the BUSHING elements and uniquely identifies the element. |
LABEL |
The name of the BUSHING element. |
I |
Specifies the ID of the marker at which the force and moment is applied. This is designated as the point of application of the force. |
J |
Specifies the ID of the marker at which the reaction force and moment is applied. This is designated as the point of reaction of the force. |
C |
These define the three translational damping coefficient for BUSHING. All damping coefficient values must be non-negative. |
CT |
These define the three rotational damping coefficient for BUSHING. All damping coefficient values must be non-negative. |
K |
These define the three translational stiffness for BUSHING. All stiffness values must be non-negative. |
KT |
These define the three rotational stiffness for BUSHING. All stiffness values must be non-negative. |
FORCE |
These define the three translational preload force for BUSHING, measured in the J coordinate system. The data is optional. Their default values are 0. |
TORQUE |
These define the three rotational preload torque for BUSHING, measured in the J coordinate system. The data is optional. Their default values are 0. |
CommentsSee Force_Bushing |
|
ExampleThe example below shows how a BUSHING may be defined. BUSHING(26, LABEL="Bushing0", I=61, J=71, C=[60,60,60], K=[6000,6000,6000], FORCE=[33,44,55], CT=[100,100,100], KT=[1e5,1e5,1e5], TORQUE=[0,0,0]) |
|
The following MDL Model statements:
*SetBush() - asymmetric bushing pair
*SetBush() - asymmetric bushing pair with user subroutine
*SetBush() - single bushing with user subroutine
*SetBush() - symmetric bushing pair