Force_Vector_TwoBody is available in three flavors:
| • | A pure force: ForceOnly. |
| • | A pure torque: TorqueOnly. |
| • | A force and a torque: ForceAndTorque. |
For the sake of clarity, the formats for the three variations are shown separately.
ForceOnly
<Force_Vector_TwoBody
id = "integer"
i_marker_id = "integer"
j_floating_marker_id = "integer"
[
ref_marker_id = "integer"
label = "integer"
]
type = "ForceOnly"
[
fx_expression = "expression"
fy_expression = "expression"
fz_expression = "expression"
usrsub_dll_name = "valid_path_name"
usrsub_param_string = "USER(par_1, ... par_n)"
usrsub_fnc_name = "custom_fnc_name"
script_name = "valid_path_name"
interpreter = "PYTHON" | "MATLAB"
usrsub_param_string = "USER(par_1, ..., par_n)"
usrsub_fnc_name = "custom_fnc_name"
]
/>
TorqueOnly
<Force_Vector_TwoBody
id = "integer"
i_marker_id = "integer"
j_floating_marker_id = "integer"
[
ref_marker_id = "integer"
label = "integer"
]
type = "TorqueOnly"
[
tx_expression = "expression"
ty_expression = "expression"
tz_expression = "expression"
usrsub_dll_name = "valid_path_name"
usrsub_param_string = "USER(par_1, ... par_n)"
usrsub_fnc_name = "custom_fnc_name"
script_name = "valid_path_name"
interpreter = "PYTHON" | "MATLAB"
usrsub_param_string = "USER(par_1, ..., par_n)"
usrsub_fnc_name = "custom_fnc_name"
]
/>
ForceAndTorque
<Force_Vector_TwoBody
id = "integer"
i_marker_id = "integer"
j_floating_marker_id = "integer"
[
ref_marker_id = "integer"
label = "integer"
]
type = "ForceAndTorque"
[
fx_expression = "expression"
fy_expression = "expression"
fz_expression = "expression"
tx_expression = "expression"
ty_expression = "expression"
tz_expression = "expression"
usrsub_dll_name = "valid_path_name"
usrsub_param_string = "USER(par_1, ... par_n)"
usrsub_fnc_name = "custom_fnc_name"
script_name = "valid_path_name"
interpreter = "PYTHON" | "MATLAB"
usrsub_param_string = "USER(par_1, ..., par_n)"
usrsub_fnc_name = "custom_fnc_name"
]
/>
|
The first example shows how the damping in a nonlinear bushing may be modeled using this component.
Bushings are used as compliant connectors in numerous applications. They are often made of material like rubber or polyurethane, and exhibit nonlinear stiffness and damping properties. Bushings are often tested in the lab and the test data is provided as input to MotionSolve. "Synthesized" test data for a bushing is shown in the image below.
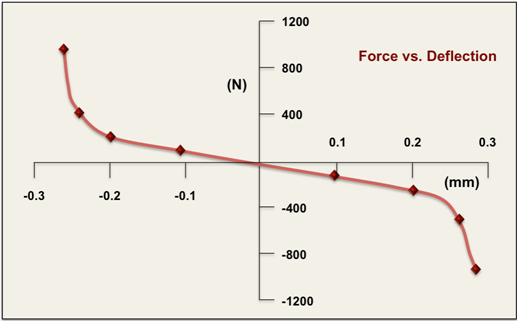
Sample test data showing a nonlinear bushing characteristic
For this example, assume a bushing was tested and three curves, 1-3, are available. These specify the dependency of the bushing damping force on deflection velocity for each of the three translational directions. The bushing connects two Reference_Markers: "1801" on Body 18 and "1901" on Body 19. We want to model the nonlinear bushing damping force in MotionSolve. Reference_Markers "1903" is the connection point of the bushing on Body 19.
The Force_Vector_TwoBody modeling element for this scenario is:
<Force_Vector_TwoBody
id = "18"
label = "My-Automotive-Bushing"
type = ForceOnly
i_marker_id = "1801"
j_floating_marker_id = "1901"
ref_marker_id = "1903"
fx_expression = "CUBSPL(0, VX(1801,1903,1903,1903), 1)"
fy_expression = "CUBSPL(0, VY(1801,1903,1903,1903), 2)"
fz_expression = "CUBSPL(0, VZ(1801,1903,1903,1903), 3)"
/>
The following points are worth noting:
In the example, we have chosen to use Reference_Marker "1903" as the reference coordinate system for the bushing. The time derivative of the displacement vector is therefore taken in the reference frame of Reference_Marker "1903". This is not the same as taking the time derivative in the Global Reference Frame. The reference frame for time derivatives is the last parameter in the argument list for VX(), VY(), and VZ() functions.
| • | This is a very simple damping model. Most bushings exhibit non-linearities like hysteresis and frequency/amplitude dependent behavior. These are ignored in this example. |
| • | A stiffness model could also be added to the force expressions for this model, thereby creating one component that models both the stiffness and damping properties. |
Assume now that the following are also available:
| • | Three curves, with IDs 4-6, specifying bushing force versus bushing deflection. |
| • | Three curves, with IDs 7-9, specifying bushing torque versus bushing angular deflection rate. |
| • | Three curves, with IDs 10-12, specifying bushing torque versus bushing angular deflection. |
These could be used to augment the earlier model to create a more comprehensive user-defined bushing that models deflection and velocity dependent forces and torques. The augmented model would look like this:
<Force_Vector_TwoBody
id = "18"
label = "My-Automotive-Bushing"
type = ForceAndTorque
i_marker_id = "1801"
j_floating_marker_id = "1901"
ref_marker_id = "1903"
fx_expression = "CUBSPL(0, VX(1801,1903,1903,1903),1) + CUBSPL(0, DX(1801,1903,1903),4)"
fy_expression = "CUBSPL(0, VY(1801,1903,1903,1903),2) + CUBSPL(0, DY(1801,1903,1903),5)"
fz_expression = "CUBSPL(0, VZ(1801,1903,1903,1903),3) + CUBSPL(0, DZ(1801,1903,1903),6)"
tx_expression = "CUBSPL(0, WX(1801,1903,1903), 7) + CUBSPL(0, AX(1801,1903), 10)"
ty_expression = "CUBSPL(0, WY(1801,1903,1903), 8) + CUBSPL(0, AY(1801,1903), 11)"
tz_expression = "CUBSPL(0, WZ(1801,1903,1903), 9) + CUBSPL(0, AZ(1801,1903), 12)"
/>
WX(), WY(), and WZ() measure the angular deflection rate in the bushing while AX(), AY() and AZ() measure angular deflection in the bushing. The angular deflections are assumed to be small (less than 10 degrees).
|