Consider James Watt’s flyball governor as shown schematically in the image below. The yellow circles depict hinges, the two red spheres depict the flyballs, and the blue body depicts the sleeve. 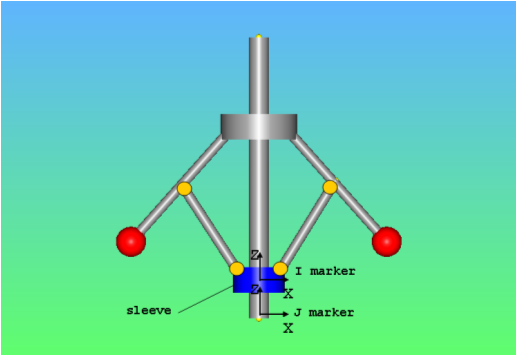
James Watt's flyball governor
In his book, Out of Control, Kevin Kelly describes the flyball governor:
"Two leaden balls, each at the end of a stiff pendulum, swing from a pole. As the pole rotates, the balls spin out levitating higher the faster the system spins. Linkages scissored from the twirling pendulums slide up a sleeve on the pole, levering a valve which controls the speed of rotation by adjusting the steam."
The connection between the sleeve and the governor shaft may be modeled using a cylindrical joint element.
Assume that at the start of the simulation:
| • | The governor arms (and hence the sleeve) are spinning with angular velocity 3.147 radians per second. |
| • | The sleeve is sliding upward on the shaft with velocity 4.5 mm/sec. |
The initial velocity of the entire system may be specified simply by specifying the initial velocity of the cylindrical joint between the sleeve and the shaft, with id 1, as follows:
<JointInitialvel_Cyl
joint_id = "1"
trans_iv = "4.5"
rot_iv = "3.147">
</JointInitialvel_Cyl>
|






