Model Element
|
Description
|
The Jointlnitialvel_Rev element defines the initial angular velocity for a revolute joint element.
|
Format
|
<JointInitial_Rev
joint_id = "integer"
iv = "real"
</JointInitial_Rev>
|
Attributes
|
joint_id
|
The ID of the revolute joint whose initial velocity is being specified.
|
iv
|
The initial rotational velocity of the revolute joint. The value specified is the rotational velocity of the I marker of the joint relative to the J marker of the joint. The unit is radians per model time unit.
A positive value specifies a velocity in the counterclockwise direction.
|
Comments
|
| 1. | Besides joints, there are two other ways to specify initial velocity in MotionSolve models: using the Motion_Joint or Motion_Marker element and using the Body_Flexible, Body_Rigid, or Body_Point element. |
| 2. | If there is a conflict among initial conditions specified using these various elements, the following precedence rule is applied: Motion elements override the joint elements which in turn override the body elements. |
| 3. | The number of initial conditions should not exceed the total number of degrees of freedom in the model. |
| • | A system with one degree of freedom should have only one velocity initial condition. The constraints apply consistent velocities to the rest of the states in the model. |
| • | A system with zero degrees of freedom should have no velocity initial conditions. |
|
Example
|
Consider the simple 2-dimensional pendulum shown in the image below.
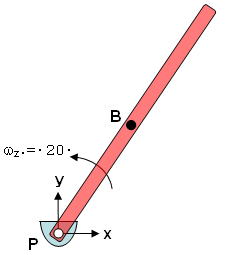
Specification of initial velocity for a revolute joint
Assume that the pendulum body (shown in red) is pivoted at the global origin, denoted by point P, by a revolute joint, such that rotation is allowed about the global z-axis. The center-of-mass of the pendulum is at B.
At the start of the simulation, the pendulum is rotating counterclockwise about the global z-axis at 20 radians per second. The initial velocity of the revolute joint may be specified as follows:
<JointInitial_Rev
joint_id = "1"
iv = "20">
</JointInitial_Rev>
|
See Also:
Body_Rigid
JointInitialVel_Cyl
JointInitialVel_Trans
Motion_Joint
Motion_Marker
Model Statements
Command Statements
Functions
Notation and Syntax
The following MDL Model statements:
*SetJointIC() - asymmetric joint pair
*SetJointIC() - single joint
*SetJointIC() - symmetric joint pair






