Model Element
|
Description
|
The JointInitialvel_Trans element defines the initial translational velocity for a translational joint element.
|
Format
|
<JointInitialVel_Trans
joint_id = "integer"
iv = "real"
/>
|
Attributes
|
joint_id
|
The ID of the translational joint whose initial velocity is being specified.
|
iv
|
The initial translational velocity of the translational joint. The value specified is the translational velocity of the I marker of the joint relative to the J marker of the joint. The unit is model length unit per model time unit.
|
Comments
|
| 1. | Besides joints, there are two other ways to specify initial velocity in MotionSolve: using the Motion_Joint or Motion_Marker element or using the Body_Flexible, Body_Rigid, or Body_Point element. |
| 2. | If there is a conflict among initial conditions specified using these various elements, the following precedence rule is applied: Motion elements override the joint elements which in turn override the body elements. |
| 3. | The number of initial conditions should not exceed the total number of degrees of freedom in the model. |
| • | Thus, a system with one degree of freedom should have only one velocity initial condition. The constraints apply consistent velocities to the rest of the states in the model. |
| • | A system with zero degrees of freedom should have no velocity initial conditions. |
|
Example
|
The image below shows the schematic of a translational joint which is connecting the actuator body to the ground.
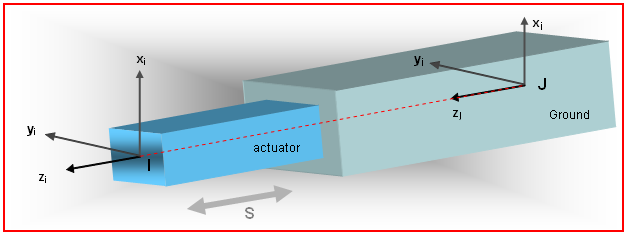
A translational joint
Assume that at the start of the simulation, the actuator is being ejected out of the Ground body at 10 millimeters per second. The initial velocity for the translational joint may be specified as follows:
<JointInitialVel_Trans
joint_id = "1"
iv = "10">
/>
|
See Also:
Body_Rigid
JointInitialvel_Cyl
JointInitialvel_Rev
Motion_Joint
Motion_Marker
Model Statements
Command Statements
Functions
Notation and Syntax
The following MDL Model statements:
*SetJointIC() - asymmetric joint pair
*SetJointIC() - single joint
*SetJointIC() - symmetric joint pair






