Definition
This interface is used to simulate impacts between a master surface and a list of slave nodes (Fig. 5.4). The interface is oriented; therefore contact can only occur on one side of the master segments. Thus, master segments normal must be oriented towards the slave nodes.
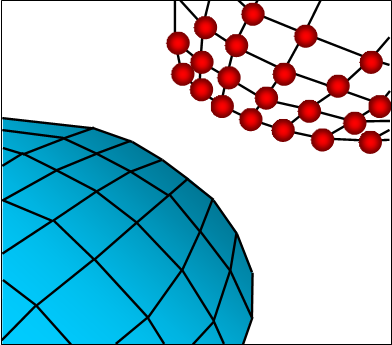
Fig. 5.4: Interface type 5
The master surface mesh has to be regular with a good aspect ratio. It is not allowed to put the slave node on the master surface. It works only with master segments connected to solid or shell elements. One use of this interface is to replace rigid wall. Replacing a rigid wall with interface type 5 will allow you to simulate rigid body impacts.
With interface type 5, a gap is used to determine contact between a node and a surface. This gap is user-defined and is located on the side normal to the surface. It is recommended to use a small or zero gap.
When contact is detected, an elastic spring is added and the spring stiffness is calculated using material and geometric properties of the master segment only. For stability reason, a stiffness scale factor of 0.2 is applied to the master side stiffness. It is strongly advised not to modify this factor unless the master side is very soft compared to the slave side. If that is the case, it is recommended to use the ratio of the greater elastic modulus over the lower one as stiffness scale factor.
As mentioned previously, the stiffness depends on the geometric and material properties and also on the type of element. Table 5.2 describes the way stiffness is computed according to the type of element the segment is attached to. In case a segment is common to a brick and a shell (for example: 3D part covered by a skin), the stiffness used is the one associated with the shell element.
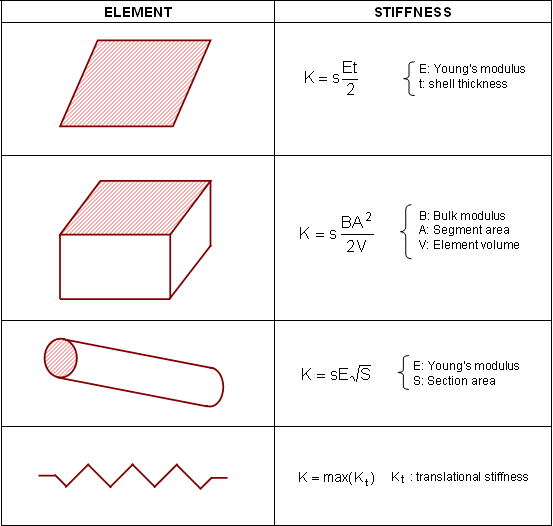
Table 5.2: Stiffness in interface type 5
The main drawback of interface type 5 is that contact cannot occur on both sides of the master segment. For a problem with large rotations (usually the case in a crash analysis), contact is likely to occur on the wrong side of the surface; therefore penetration will not be detected. Consequently, for a complex contact problem, a good understanding of the impact is necessary prior to the simulation to properly define normal surfaces.
Another important drawback is that a node is not allowed to be a slave node and part of a master segment. Therefore, auto-contact cannot be simulated through the use of interface type 5.





