Example-1
This example demonstrates how to use an EXPRESSION based Reference_Variable to calculate the kinetic energy of a rigid body. In the example below, the ID of the Reference_Variable is 3070. 1011 is a MARKER that defines the center of mass of a rigid body with mass 4kg and principal moments of inertia Ixx=0.006 Kgm2, Iyy=0.005 Kgm2, and Izz=0.004 Kgm2. Reference_Variable 3070 is the total kinetic energy of the rigid body.
<Reference_Variable
id = "3070"
type = "EXPRESSION"
expr = "0.5*(4*VM(1011)**2 + 0.006*WX(1011)**2 + 0.005*WY(1011)**2 +
0.004*WZ(1011)**2)"
/>S
Example-2
The second example does the same as the first example. The implementation, however, is done within a user subroutine. A user-defined subroutine VARSUB that can calculate the Kinetic Energy of any rigid body is written first. The input parameters to the VARSUB are the mass and inertia properties of the rigid body and the ID of the center of mass Marker. The VARSUB returns the kinetic energy of the rigid body. This provides a generic function that can calculate the kinetic energy of any rigid body.
<Reference_Variable
id = "3070"
type = "USERSUB"
usrsub_param_string = "USER (1011, 4, 0.006, 0.005, 0.004)"
usrsub_dll_name = "/Users/ms_test/ke.dll"
usrsub_fnc_name = "Kinetic_Energy"
/>
The VARSUB, written in Python, is shown below.
from math import *
def VARSUB(id, time, par, npar, dflag, iflag):
# Get information from the par array
icm = 1*[0]
icm[0] = par[0]
mass = par[1]
ixx = par[2]
iyy = par[3]
izz = par[4]
# get the translational and rotational velocity states
[vm,errflg] = py_sysfnc ("VM", icm)
[w, errflg] = py_sysary ("RVEL", icm)
# Calculate the kinetic energy
if iflag:
KE = 0.0
else:
KE = 0.5 * (mass*vm**2 + ixx*w[0]**2 + iyy*w[1]**2 + izz*w[2]**2)
return KE
Example-3
The third example demonstrates a simple 2D example where a constraint is applied at one point in the system but the reaction forces are desired at some other point. Figure 1 below represents a 2D robot that is anchored to ground. The end-effector of the robot, T, is required to trace a path in 2D space as shown in the figure. F(t) and g(t) are specified through Spline/1 and Spline/2, respectively. The parameter t represents system simulation time. In the model, Reference_Marker 11 represents the tip of the end-effector.
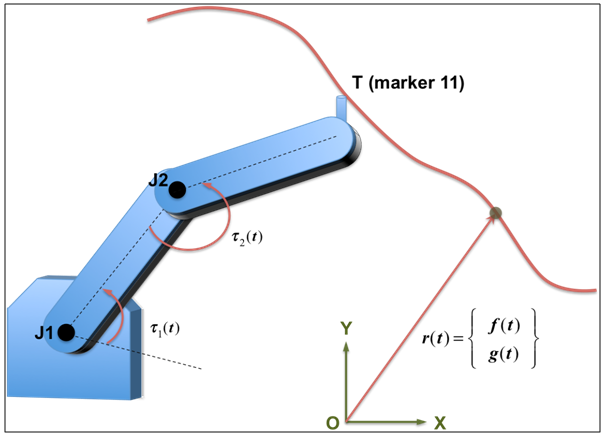
Figure 1: A 2D robot required to execute a complex 2D path in space
The various bodies have mass and inertia properties and they have a well-defined geometry. For the purposes of this example, they are not relevant. However, it is important to note that they have to be defined elsewhere in the model.
As a designer of the robot, you are required to size the motors acting at revolute joints J1 and J2 in the system. In order to size the motors, you need to know the torques that are to be applied at the joints. If you create three Motion_Markers to define the constraints, MotionSolve will compute the forces at the tip of the end-effector, not the torques that are to be applied at J1 and J2.
The solution to this problem is to create constraints that define the motion of Marker 11. However, you will need to apply torques at J1 and J2 to generate the motion. This can be done as follows:
Step-1: Define two algebraic constraints that define the motion of Marker 11
<Reference_Variable |<Reference_Variable
id = "1" | id = "2"
type = "EXPRESSION" | type = "EXPRESSION"
expr = "DX(2011) - cubspl(time, 0, 1)" | expr = "DY(2011) - cubspl(time, 0, 2)"
is_implicit = "True" | is_implicit = "True"
autobalance = "Disabled" | autobalance = "Disabled"
/> |/>
Step-2: Apply the internal force as torques at joints J1 and J2
Assume that J1 is defined with I marker=33, J Marker=44 and J2 is defined with I marker=55, J Marker=66
<Reference_Variable |<Reference_Variable
id = "1" | id = "2"
type = "EXPRESSION" | type = "EXPRESSION"
expr = "DX(2011) - cubspl(time, 0, 1)" | expr = "DY(2011) - cubspl(time, 0, 2)"
is_implicit = "True" | is_implicit = "True"
autobalance = "Disabled" | autobalance = "Disabled"
/> |/>
Step-3: Look at the torques applied at the Joints to size the motors
Varval(1) and Varval(2) are the torques applied at joint J1 and J2 respectively.
Example-4
This example demonstrates the use of Reference_Variables to define Plant_Inputs for a control system defined in MATLAB. Consider the control problem of stabilizing an inverted pendulum mounted on a slider. The image below shows one such setup. The slider, the green block, is constrained to move along the global X-axis by a translational joint with ground, depicted as the red strip.
The pendulum is hinged to the slider with the axis of rotation parallel to the global Y-axis. Assume that the markers defining the revolute joint are 1011 and 2011. The slider motion is opposed by a linear spring-damper. The pendulum is modeled in MotionSolve, the control force Fc is calculated by MATLAB.
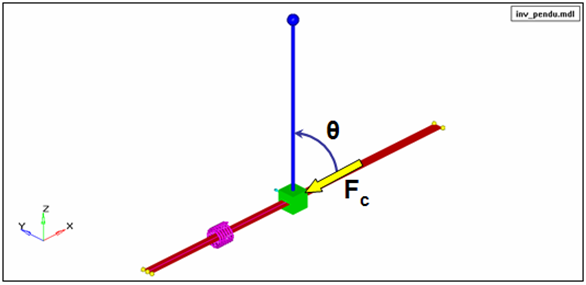
Figure 2: Inverted pendulum model
Assume that the task is to design a controller to stabilize the unstable configuration shown in the image above. Start by defining the inputs and outputs to the mechanical system defined in MotionSolve:
| • | Plant input: Control force Fc acting on slider. This is computed by MATLAB and sent to MotionSolve. |
| • | Plant output: Pendulum angle θ and angular velocity ω. These signals are sent to MATLAB. |
The plant output may be defined as follows:
<Control_PlantOutput
id = "303001"
num_element = "2"
variable_id_list = "12", "13"
hold_order = "1"
/>
Reference_Variable 12 defines the pendulum angle θ and Reference_Variable 13 defines the pendulum angular velocity, ω. These Reference_Variables are defined below.
<Reference_Variable |<Reference_Variable
id = "12" | id = "13"
type = "EXPRESSION" | type = "EXPRESSION"
expr = "-AY(1011,2011)" | expr = "-WY(1011,2011)"
/> | />
Example-5
This example illustrates a variable used to define a steering gear ratio in an automobile model. The Steering Ratio is the ratio between the turn of the steering wheel and the turn of the wheels. A higher steering ratio means that you have to turn the steering wheel more to get a specific wheel turn, but it will be easier to turn the steering wheel. A lower steering ratio has the inverse effect.
The objective of this exercise is to use a Reference_Variable to define the steering ratio, given the steering when angle. Once the ratio is defined, it can be used downstream to apply the correct torques on the wheels.
Assume that the revolute joint on the steering wheel is defined by I-Marker = 6565 and J-Marker = 7676. The variables defining the steering angle and the steering gear ratio are shown below.
<Reference_Variable | <Reference_Variable
id = "1" | id = "2"
label = "Steering angle in degrees" | label = "Steering gear ratio"
type = "EXPRESSION" | type = "EXPRESSION"
expr = "RTOD * ABS(AZ(6565,7676))" | expr = "step(varval(1), 100, 1000, 150, 1500)"
/> | />
The steering gear ratio is designed to not be less than 1000 and to not exceed 1500. The relationship between the steering angle and the steering gear ratio is shown in Figure 3 below.
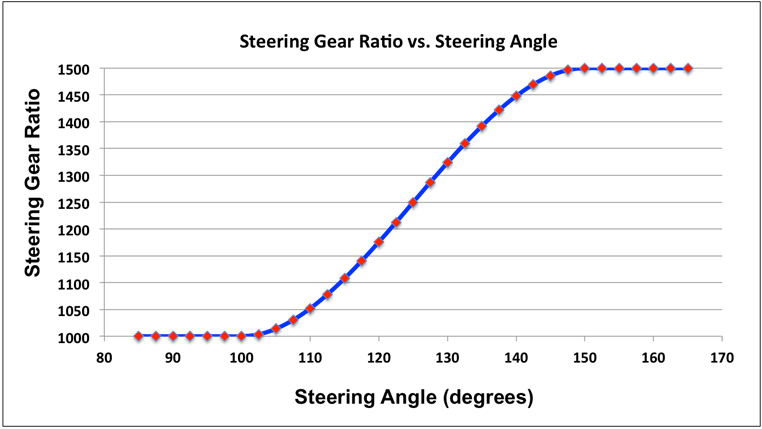
Figure 3: Steering Gear Ratio vs. Steering Angle
Example-6
A Reference_Variable may be used to define a “soft constraint” by using the penalty option. Here is a simple example to illustrate this.
Consider a situation where you want to maintain the angle between the z-axis of Marker 11 and the z-axis of Marker 21 to be 60 degrees as shown in Figure 4 below.
Figure 4: The angle between the z-axis of two markers
You could use a General_Constraint to define this constraint. However, if you wanted to include some system flexibility in the model, then you would want to model the kinematic condition as a “soft constraint”, so as to allow some violation.
The variable defining the soft constraint is shown below.
<Reference_Variable | The torque that is implemented
id = "1" | 
label = "A soft constraint" |
type = "EXPRESSION" |
expr = "theta(21,11) - 60D |
is_implicit = "TRUE" |
autobalance = "PENALTY" |
penalty = "1000.0" |
penalty1 = "10.0" |
/>
Force_Penalty is a more natural way to define the soft constraint. The corresponding statement for Force_Penalty is:
<Force_Penalty | The torque that is implemented
id = "1" | 
label = "A soft constraint" |
type = "EXPRESSION" |
expr = "theta(21,11) - 60D" |
penalty = "1000.0" |
penalty1 = "10.0" |
/>
|