|
»Click here to display Table of Contents«
|

Output: Results |

|

|

|

|
|
Output: Results |
|
|

|

|
|
»Click here to display Table of Contents«
|
Output: Results |
|
|
|
|
|
Output: Results |
|
|
|
|
Command Element |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Description |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
The ResOutput command defines options for output files to be generated by MotionSolve. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Format |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
<ResOutput { mrf_file = { "TRUE" | "FALSE" } abf_file = { "TRUE" | "FALSE" } plt_file = { "TRUE" | "FALSE" } abf_unique_time = { "FIRST" | "LAST" | "ALL" } plt_unique_time = { "FIRST" | "LAST" | "ALL" } angle_type = { "YPR" | "EULER_ANGLES" } flex_vel_acc_output = { "TRUE" | "FALSE" } contact_gra_output = { "TRUE" | "FALSE" } cof_file = { "TRUE" | "FALSE" } capture_max_pd = { "TRUE" | "FALSE" } req_comment_only = { "TRUE" | "FALSE" } dzero = { "TRUE" | "FALSE" } vzero = "real" azero = "real" fzero = "real" } /> |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Attributes |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
mrf_file |
TRUE creates a MRF file, FALSE does not. When not specified, the default is TRUE. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
abf_file |
TRUE creates an ABF file, FALSE does not. When not specified, the default is TRUE. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
abf_unique_time |
Controls which result is written to the ABF file when there are more than one result data at a single time step. See Comment 8 for more details. Choose from FIRST, LAST or ALL. The default is ALL. FIRST: The first of the two results is written to the ABF file. LAST: The last of the two results is written to the ABF file. This is the default value. ALL: Both results are written to the ABF file. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
plt_file |
TRUE creates a PLT file, FALSE does not. When not specified, the default is FALSE. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
plt_unique_time |
Controls which result is written to the PLT file when there are more than one result data at a single time step. See Comment 8 for more details. Choose from FIRST, LAST or ALL. The default is LAST. FIRST: The first of the two results is written to the PLT file. LAST: The last of the two results is written to the PLT file. This is the default value. ALL: Both results are written to the PLT file. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
angle_type |
Select from EULER_ANGLES or YPR (Yaw, pitch and roll angles). When not specified, the default is Body Fixed 3-1-3 EULER_ANGLES. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
flex_vel_acc_output |
Select from TRUE or FALSE to enable or disable velocity and acceleration output for flexible bodies during a MotionSolve run. When not specified, the default is FALSE. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
dzero |
Output displacements less than the specified value are set to be equal to zero. The specified value must be greater than zero. When not specified, dzero defaults to 1.0E-12. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
vzero |
Output velocities less than the specified value are set to be equal to zero. The specified value must be greater than zero. When not specified, vzero defaults to 1.0E-12. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
azero |
Output accelerations less than the specified value are set to be equal to zero. The specified value must be greater than zero. When not specified, azero defaults to 1.0E-12. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
fzero |
Output forces less than the specified value are set to be equal to zero. The specified value must be greater than zero. When not specified, fzero defaults to 1.0E-12. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
contact_gra_output |
Select from TRUE or FALSE to enable or disable contact force vector animation in the .h3d file. When not specified, the default is TRUE. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
cof_file |
This parameter determines if the contact summary table information is written to the log file and a *.cof ASCII file on disk. Set this to FALSE to disable the contact overview table output. See Comment 9 for more details. The default is TRUE |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
capture_max_pd |
When capture_max_pd is set to TRUE, MotionSolve monitors and reports the maximum penetration for colliding bodies in between two output steps as defined by the print_interval. See Comment 10 for more details. The default for capture_max_pd is FALSE |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
req_comment_only |
This flag controls how the output request names are written to the MRF and ABF files. Please see Comment 11 for more details. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Comments |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
The contents of the PLT file may also be plotted in HyperGraph; however, we recommend that you use the ABF for plotting.
<Simulate analysis_type = "Static" end_time = "0.2" num_step = "2" />
<Simulate analysis_type = "Static" end_time = "0.4" num_step = "2" />
In this case, at t=0.2s, there are two results – one from the last time step of the first quasi-static simulation ending at t=0.2s, and one from the first time step of the second quasi-static simulation starting at t=0.2s. The attributes plt_unique_time and abf_unique_time allow you to control which data is written to the PLT and ABF file, respectively. Note: The MRF file, by default, always contains all the output data. For example, for the case above, it contains outputs from both the simulations at t=0.2s.
In the contact overview table, for each contact force element, the following are listed:
A sample contact overview table is shown here:
Contact Graphics ---------------- 90000 "Model-Box 1" 90001 "Model-Sphere 1" 90021 "Model-Box 0"
Contact Overview (sorted by MAX_PD / MAX_FORCE) ------------------------------------------------------------------------------- CONTACT I_GRAPHIC J_GRAPHIC MAX_PD (TIME) MAX_FORCE (TIME) ------------------------------------------------------------------------------- 301001 90000 90021 9.994E-01 (1.798E-01) 7.429E+02 (1.798E-01) 301001 90000 90021 9.994E-01 (1.798E-01) 7.429E+02 (1.798E-01) 301001 90001 90021 6.844E-01 (4.192E-02) 4.289E+02 (4.192E-02) 301001 90001 90021 6.844E-01 (4.192E-02) 4.289E+02 (4.192E-02) The *.cof is an ASCII file that contains, in addition to the above, the following information:
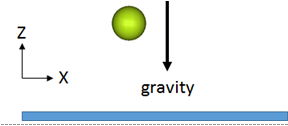
Thus by setting capture_max_pd = TRUE, you can obtain additional information about the contact events in your model without reducing the output step size. This is useful when you do not know a-priori when the contact event will occur in your model. Consider the simple example of a ball falling on the ground under gravity as illustrated below.
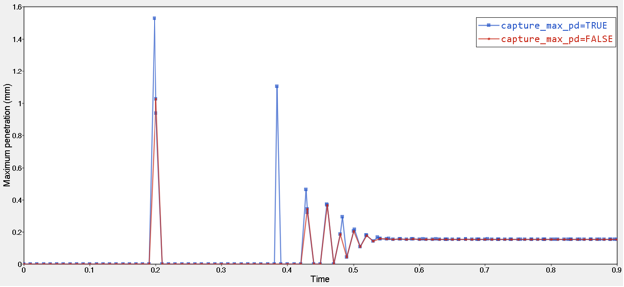
Figure 1 - A simple model for a spherical body falling on the ground under gravity The output step is set to 0.01s, maximum solver step size is 0.001s and the model is simulated for 1s. Default parameters are used for the contact force definitions. Meshed representations are used for both geometries. The ball is expected to come into contact with the ground and bounce a few times before coming to rest on the ground. The maximum penetration depth between the two bodies is monitored as an output signal. Figure 2 shows the maximum penetration depth plotted against time with capture_max_pd set to TRUE and FALSE.
Figure 2: Comparison of the penetration depth with capture_max_pd set to TRUE and FALSE
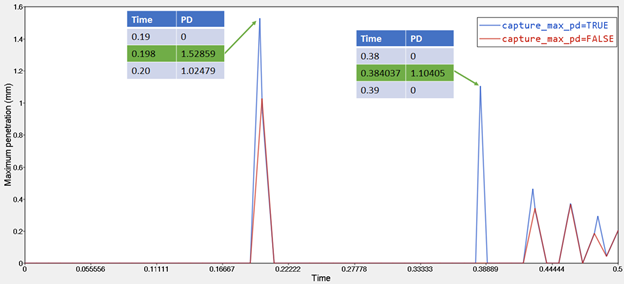
Figure 3: Additional output steps are written when capture_max_pd = TRUE Zooming in on the first contact at ~0.2s (Figure 3), it can be seen that there is an additional output step at t=0.198s (blue curve). The maximum penetration depth (PD) at t=0.198s is greater than at t=0.19s or t=0.20s, which are the output steps. The same scenario is also observed at the second contact point, at t=~0.38s. With capture_max_pd set to FALSE (red curve), these events when maximum penetration occurs will be omitted from the results as can be seen in the plots above.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Example |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
<ResOutput mrf_file = "TRUE" abf_file = "FALSE" plt_file = "FALSE" angle type = "YAW_PITCH_ROLL" flex_vel_acc_output = "TRUE" contact_gra_output = "TRUE" /> |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Command Element |
|
Description |
|
The OUTPUT command defines options for the output files to be generated by MotionSolve. |
|
Declaration |
|
def OUTPUT(REQSAVE=False, YPR=False, XMLSAVE=False): |
|
Attributes |
|
REQSAVE |
TRUE creates a PLT file, FALSE does not. When not specified, the default is FALSE. |
YPR |
TRUE creates YAW_PITCH_ROLL output. FALSE does not. When not specified, the default is Body Fixed 3-1-3 EULER_ANGLES. |
XMLSAVE |
TRUE saves the XML file. FALSE disables saving XML file. Default is FALSE |
CommentsSee ResOutput |
|
Example |
|
The example below demonstrates how to define an OUTPUT command. OUTPUT(REQSAVE=False, YPR=True, XMLSAVE=False) |
|
See Also: