|
»Click here to display Table of Contents«
|

/RBE2 |

|

|

|

|
|
/RBE2 |
|
|

|

|
|
»Click here to display Table of Contents«
|
/RBE2 |
|
|
|
|
|
/RBE2 |
|
|
|
|
Block Format Keyword
/RBE2 - Rigid Element
Defines a rigid body whose independent degrees of freedom are specified at a single master node and whose dependent degrees of freedom are specified at an arbitrary number of slave nodes.
(1) |
(2) |
(3) |
(4) |
(5) |
(6) |
(7) |
(8) |
(9) |
(10) |
/RBE2/rbe2_ID |
|||||||||
rbe2_title |
|||||||||
node_ID |
Trarotref |
skew_ID |
grnd_ID |
Iflag |
|
|
|
|
|
|
|
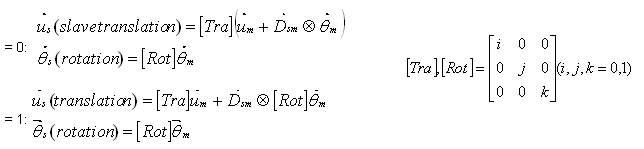
The default formulation Iflag =0 corresponds to OptiStruct’s RBE2, in which the motion of a group of slave nodes depends on the motion of one master node which always has 6 DOF. The input Trarotref is applied on the slave nodes and the element behaves like a rigid body. The second formulation is similar to Rigid Link; but takes into account the equilibrium between translations and rotations. The input Trarotref is applied on master node, this formulation is used prior to version 10.0.5.
RBODY > RBE3 > RBE2 > INTERFACE TYPE2
|
See Also: