|
»Click here to display Table of Contents«
|

TABDMP1 |

|

|

|

|
|
TABDMP1 |
|
|

|

|
|
»Click here to display Table of Contents«
|
TABDMP1 |
|
|
|
|
|
TABDMP1 |
|
|
|
|
Bulk Data Entry
TABDMP1 – Modal Damping Table
Description
Defines modal damping as a tabular function of natural frequency.
Format
(1) |
(2) |
(3) |
(4) |
(5) |
(6) |
(7) |
(8) |
(9) |
(10) |
TABDMP1 |
TID |
TYPE |
|
FLAT |
|
|
|
|
|
|
f1 |
g1 |
f2 |
g2 |
f3 |
g3 |
f4 |
g4 |
|
|
f5 |
g5 |
… |
… |
… |
… |
… |
… |
|
|
Field |
Contents |
|---|---|
TID |
Table identification number. No default (Integer > 0) |
TYPE |
Type of damping units. Default = G (G, CRIT, or Q) |
FLAT |
Specifies the handling method for y-values outside the specified range of x-values in the table. = 0: If an x-value input is outside the range of x-values specified on the Table, the corresponding y-value look up is performed using linear extrapolation from the two start or two end points. = 1: If an x-value input is outside the range of x-values specified on the Table, the corresponding y-value is equal to the start or end point, respectively. Default = 0 (0 or 1) |
|
Natural frequency value in cycles per unit time. Must be specified in either ascending or descending order, but not both. May be ignored by placing 'SKIP' in either of the two fields used for that entry. No default (Real > 0.0) |
|
Damping value. May be ignored by placing 'SKIP' in either of the two fields used for that entry. No default (Real) |
| 1. | Modal damping tables must be selected in the Subcase Information section, using the SDAMPING entry. This form of damping is supported in modal transient, modal frequency response, and modal complex eigenvalue analyses. |
| 2. | A METHOD statement must be present in the SUBCASE. |
| 3. | Discontinuities may be specified between any two points except the two starting points or two end points. For example, in Figure 1 discontinuities are allowed only between points f2 through f7. Also, if g is evaluated at a discontinuity, then the average value of g is used. In Figure 1, the value of g at f=f3 is g = (g3+g4)/2. |
| 4. | At least one continuation entry must be specified. |
| 5. | The end of the table is indicated by the existence of 'ENDT' in either of the two fields following the last entry. An error is detected if any continuations follow the entry containing the end-of-table flag 'ENDT'. |
| 6. | For FLAT=0 (default), TABDMP1 uses the algorithm: g = gT(f) |
Where, f is input to the table and g is returned. The table look-up gT(f) is performed using linear interpolation within the table and linear extrapolation outside the table using the two starting or end points. See Figure 1. No warning messages are issued if table data is input incorrectly.
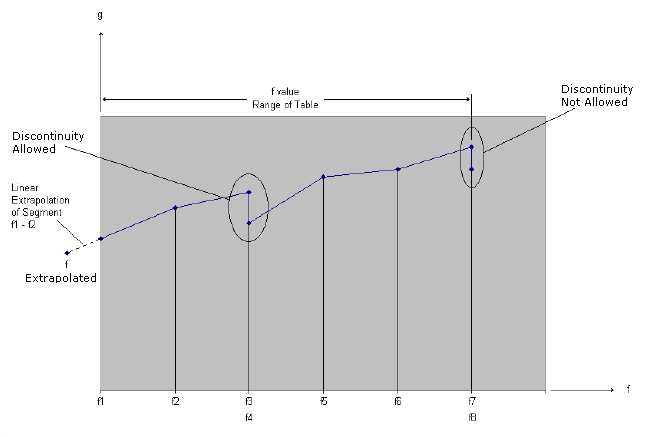
Figure 1. Example of Table Extrapolation and Discontinuity
For FLAT=1, the same algorithm as FLAT=0 is used, except that values outside the range are not extrapolated. The corresponding start or end point y-values are used for all y-values outside the range.
| 7. | The KDAMP option, on the PARAM card, may be used to switch between viscous and structural damping. Viscous is the default and is used when PARAM, KDAMP is not present. |
KDAMP |
Result |
|---|---|
1 (default) |
B matrix |
-1 |
(1+ig)K matrix |
| 8. | If TYPE is 'G' or blank, the damping values |
![]()
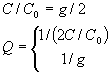
If TYPE is 'CRIT', the damping values ![]() are in units of fraction of critical damping C/C0.
are in units of fraction of critical damping C/C0.
If TYPE is 'Q', the damping values ![]() are in the units of amplification or quality factor, Q. These constants are related by the following equations:
are in the units of amplification or quality factor, Q. These constants are related by the following equations:
| 9. | To achieve identical displacements in Modal frequency response or Modal transient analyses when the SDAMPING bulk data entry is used instead of PARAM, G, the steps described here can be followed: |
| • | The TYPE field in the TABDMP1 bulk data entry should be set to CRIT. This TABDMP1 bulk data entry is referenced by the SDAMPING subcase information entry. |
| • | Set the damping value (field |
| • | Set PARAM, KDAMP,-1 |
| 10. | This card is represented as a loadcollector in HyperMesh. |
See Also: