Parameter blocks include one block for each available force method as follows:
Spline stiffness blocks store the static stiffness properties of a bushing. The data is stored in a table of monotonically increasing deflections versus forces. If the direction block selects the spline stiffness formulation for a given direction, for example FZ, then the property file should contain a corresponding spline stiffness block for that direction, such as [SPLINE_STIFFNESS_FZ].
The following table shows the parameters stored in spline stiffness blocks.
Abbreviations are [A] = angle dimension, [F] = force, [L] = length.
Parameter
|
Type
|
Dimension FX, FY, FZ
|
Dimension TX, TY, TZ
|
Displacement
|
real
|
[L]
|
[A]
|
Force
|
real
|
[F]
|
[F][L]
|
When the property file is read the deflection and force values are converted from the units of the property file to the units of the solver model.
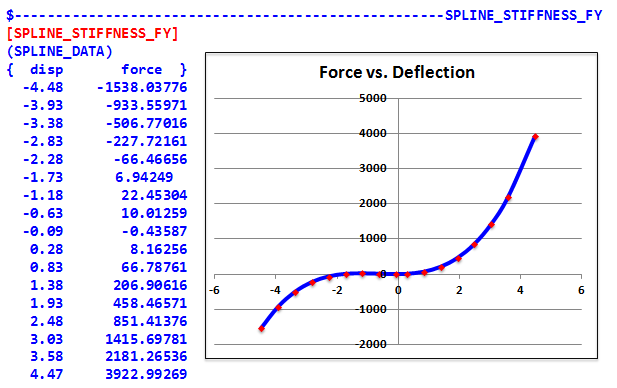
The example below shows a typical spline block in the .gbs file for the FY direction. The plot next to the data is not a part of the .gbs file, but is included here to show you the shape of the curve.
|
Cubic Stiffness blocks store a set of coefficients that determine two cubic polynomials defining a force verses deflection curve. If the Direction block selects the cubic stiffness formulation for TY direction, then the property file, for example, must contain a [CUBIC_STIFFNESS_TY] block.
The following table describes the parameters stored in a Cubic Stiffness block. Abbreviations are: [F] = force, [L] = length.
Parameter
|
Type
|
Dimension FX, FY, FZ
|
Dimension TX, TY, TZ
|
EN
|
real
|
[L]
|
Angle
|
ENS
|
real
|
[F][L-1]
|
[F][L] /Angle
|
RN
|
real
|
[L]
|
Angle
|
RNF
|
real
|
[F]
|
[F][L]
|
OS
|
real
|
[F][L-1]
|
[F][L] /Angle
|
OF
|
real
|
[F]
|
[F][L]
|
O
|
real
|
[L]
|
Angle
|
RP
|
real
|
[L]
|
Angle
|
RPF
|
real
|
[F]
|
[F][L]
|
EP
|
real
|
[L]
|
Angle
|
EPS
|
real
|
[F][L-1]
|
[F][L] /Angle
|
In a property file, a cubic stiffness block has this form:
[CUBIC_STIFFNESS_TY]
EN = -0.20
ENS = 200000.0
RN = -0.10
RNF = -30000.0
O = 0.0
OF = 0.0
OS = 20000.0
RP = 0.10
RPF = 30000.0
EP = 0.20
EPS = 200000.0
|
Constant Stiffness blocks store the translational or rotational stiffness for a given direction.
The following table describes the parameters stored in a Constant Stiffness block. Abbreviations are: [A] = angle dimension, [F] = force, [L] = length.
Parameter
|
Type
|
Units FX, FY, FZ
|
Units TX, TY, TZ
|
K
|
real
|
[F][L-1]
|
[F][L][A-1]
|
If the direction block selects the constant stiffness formulation for the FZ direction, then the property file, for example, must contain a [CONSTANT_STIFFNESS_FZ] block. The form of the block is:
[CONSTANT_STIFFNESS_FZ]
K = 6000.0
The dimension for stiffness for translational directions is [F][L-1] and for rotational directions [F][L]. When read from the property file, the stiffness is converted from the units defined in the property file to the solver model units.
|
Constant Damping blocks store the damping coefficient for a given direction.
The following table describes the parameters stored in a Constant Damping block. Abbreviations are: [A] = angle dimension, [F] = force, [L] = length, [T] = time.
Parameter
|
Type
|
Units FX, FY, FZ
|
Units TX, TY, TZ
|
C
|
real
|
[F][T][L-1]
|
[F][T][L][A-1]
|
If the direction block selects the constant damping formulation for the FX direction, then the property file, for example, must contain a [CONSTANT_DAMPING_FX] block. The form of the block is:
[CONSTANT_DAMPING_FX]
C = 600.0
The dimension for the damping coefficient for translational directions is [F][T][L-1] and for rotational directions [F][T][L]. When read from the property file, the damping coefficient is converted from the units defined in the property file to the solver model units.
|
The following is true:
| • | For each force or torque direction using the Rubber-Damping formulation as specified in the [DIRECTION] block, the property file must contain a corresponding RUBBER_DAMPING block giving the thirteen (13) rubber damping parameters. The block name is a concatenation of RUBBER_BUSHING_ and the force or moment direction. For example, if the direction is TX, then the block name is [RUBBER_BUSHING_TX]. |
| • | The data block contains a scalar value that determines the number of preload sub-blocks: NPRELOADS = X |
| • | For each preload there must be a corresponding data sub-block defined as: (PRELOAD_N) where N is a number from 1 to M with M being the total number of preloads. |
| • | Each Rubber Bushing block in the property file must contain all thirteen (13) rubber damping parameters. The name, type and dimension for each parameter is listed in the table below. |
| • | An optional 14th parameter, RMIN, is available to define the minimum cut-off time constant that the simulation model should use. If the value of the cut-off time constant, R, which is computed by the fitting tool, is less than RMIN, then RMIN is used. Large values of RMIN allow more frequencies to pass through the filtering mechanism. Also note that the frequency response of the bushing deviates from the experimental measurements that were made. |
| • | When not specified, RMIN defaults to 0.0, a value that guarantees for RMIN not to be used. |
The following table describes the parameters stored in a Constant Rubber Damping block. Abbreviations are: [A] = angle dimension, [F] = force, [L] = length, [T] = time.
Parameter
|
Type
|
Dimension FX, FY, FZ
|
Dimension TX, TY, TZ
|
R
|
real
|
[T-1]
|
[T-1]
|
K0
|
real
|
[F][L-1]
|
[F][L] /Angle
|
K1
|
real
|
[F][L-1]
|
[F][L] /Angle
|
K2
|
real
|
[F][L-1]
|
[F][L] /Angle
|
C0
|
real
|
[F][T][L-1]
|
[F][T][L] /Angle
|
C1
|
real
|
[F][T][L-1]
|
[F][T][L] /Angle
|
C2
|
real
|
[F][T][L-1]
|
[F][T][L] /Angle
|
P0
|
real
|
No-Units
|
[F][L] /Angle
|
P1
|
real
|
[L-P2]
|
Angle[L-P2]
|
P2
|
real
|
No-Units
|
No-Units
|
Q0
|
real
|
No-Units
|
No-Units
|
Q1
|
real
|
[L-Q2][TQ2]
|
[Angle-Q2][TQ2]
|
Q2
|
real
|
No-Units
|
No-Units
|
optional
|
RMIN
|
real
|
[T-1]
|
[T-1]
|
The following is an example of the RUBBER_DAMPING block for the X direction:
$---------------------------------------------------------------
[RUBBER_DAMPING_FX]
SPD_FILE_NAME = 'C:\Users\rajivr\Desktop\input_50289_fx.spd'
NPRELOADS = 1
(PRELOAD_1)
PRELOAD = 0.0000000000000000E+000
R = 3.7304938466506937E-001
C0 = 3.9148912713636901E+002
K0 = 1.4925221392833666E+003
C1 = 3.5544374604832620E+002
K1 = 1.2799236592247264E+004
C2 = 7.3796362578278907E-001
K2 = 1.0076285596442904E-001
P0 = 3.0189673042568872E+000
P1 = -2.3806569863314331E+000
P2 = 2.5826224628819706E-002
Q0 = 5.7885657452072947E-001
Q1 = -9.8019268585634856E-001
Q2 = 2.0000000000000000E+000
|
|
This block stores a set of coefficients for the hydromount formulation. The block name is a concatenation of HYDROMOUNT_DAMPING_ and the force or moment direction. For instance, if the direction block selects the hydromount formulation for the FZ direction, then the property file should contain a [HYDROMOUNT_DAMPING_FZ] block.
The data block contains a scalar value that determines the number of preload sub-blocks. For each preload there must be a corresponding data sub-block defined as: (PRELOAD_N) where N is a number from 1 to M with M being the total number of preloads.
Each Hydromount Damping block in the property file must contain all twenty-two (22) hydromount damping parameters.
The following table shows the names, type and dimension of the parameters. Abbreviations are: [A] = angle dimension, [F] = force, [L] = length, [T] = time.
| • | Parameters associated with the rubber are shown in light green cells. |
| • | Parameters associated with the fluid model are shown in light pink cells. |
| • | Parameters associated with transition from rubber to full hydromount are shown in white cells. |
Parameter Name
|
Type
|
Units FX, FY, FZ
|
R
|
real
|
[T-1]
|
K0
|
real
|
[F][L-1]
|
K1
|
real
|
[F][L-1]
|
K2
|
real
|
[F][L-1]
|
C0
|
real
|
[F][T][L-1]
|
C1
|
real
|
[F][T][L-1]
|
C2
|
real
|
[F][T][L-1]
|
P0
|
real
|
No-Units
|
P1
|
real
|
[L-P2]
|
P2
|
real
|
No-Units
|
Q0
|
real
|
No-Units
|
Q1
|
real
|
[L-Q2][TQ2]
|
Q2
|
real
|
No-Units
|
MN
|
real
|
[M]
|
KH
|
real
|
[F][L-1]
|
CH1
|
real
|
[F][T][L-1]
|
CH2
|
real
|
[F][T][L-1]
|
JO
|
real
|
No-Units
|
J1
|
real
|
[L-P2]
|
J2
|
real
|
No-Units
|
L0
|
real
|
No-Units
|
L1
|
real
|
[L-Q2][TQ2]
|
L2
|
real
|
No-Units
|
XR
|
real
|
[L]
|
XH
|
real
|
[L]
|
In a property file, a Hydromount Damping block has this form:
[HYDROMOUNT_DAMPING_FZ]
SPD_FILE_NAME = 'C:\Users\rajivr\Desktop\input_50289_fz.spd'
NPRELOADS = 1
(PRELOAD_1)
PRELOAD = 0.0
R = 0.001
C0 = 308.74
K0 = 275.345
C1 = 111.554
K1 = 1659.511332
C2 = 0.266419
K2 = 4.01626
P0 = 1.0
P1 = 0.0
P2 = 1.0
Q0 = 1.0
Q1 = 0.0
Q2 = 1.0
Mh = 0.01
Kh = 90.0
Ch1 = 0.10
Ch2 = 0.50
J0 = 1.0
J1 = 0.0
J2 = 1.0
L0 = 1.0
L1 = 0.0
L2 = 1.0
XR = -1.0
XH = 0.0
|
|
|






