|
»Click here to display Table of Contents«
|

Coupling |

|

|

|

|
|
Coupling |
|
|

|

|
|
»Click here to display Table of Contents«
|
Coupling |
|
|
|
|
|
Coupling |
|
|
|
|
Coupling refers to the forces and moments generated in a bushing to oppose the overall deformation of the bushing. These forces and moments are independent of any coordinate system that might be used to measure the deformation or deformation velocity. Coupling is an important factor when the bushing characteristics are non-linear.
Below we provide information on the formulation for coupling followed by three examples that show how coupling affects bushing force and torque output:
The Altair Bushing Model supports three options for coupling:
Two-dimensional coupling and three-dimensional coupling are analogous, and therefore, this guide explains coupling in terms of the two-dimensional concept. For cylindrical coupling, assume:
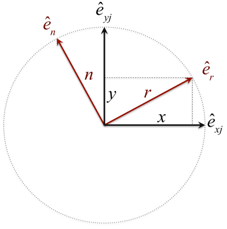
The diagram below shows the deformations and force vectors in the bushing. The J Marker is used as the coordinate system for all calculations.
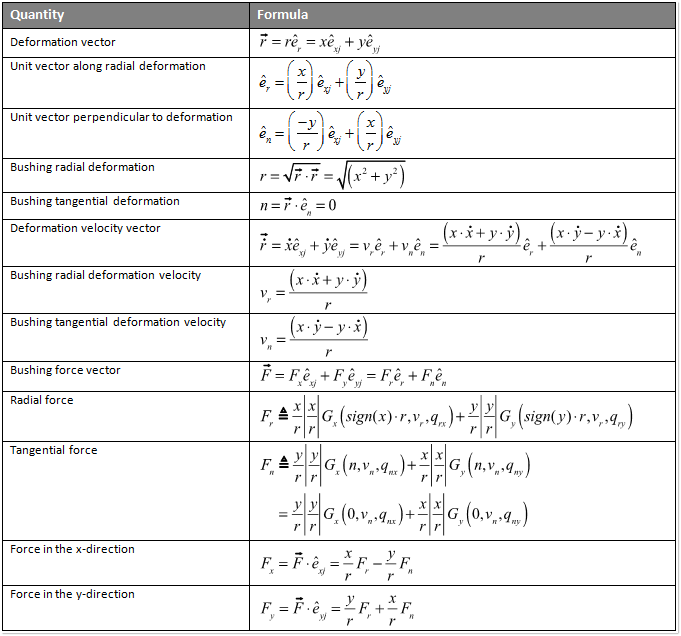
The table below shows the various quantities of interest and how they are calculated:
|
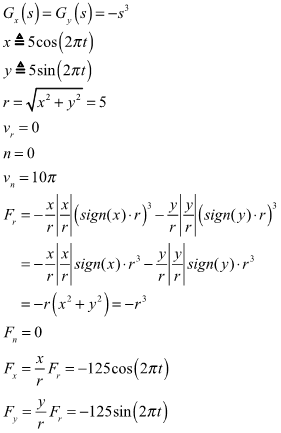
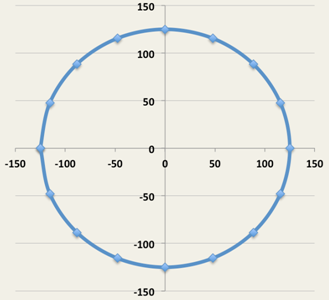
Example 1: Isotropic Bushing with No Damping and Constant Rotating DeflectionA constant deflection of 5 units stretching the bushing and rotating at 2*π radians/sec is imposed on the bushing. Rotation occurs in the X-Y plane of the J-Marker. The following equations show the forces Fx and Fy computed by the coupling formulation. The plot shows that Fy vs. Fx is a circle as expected.
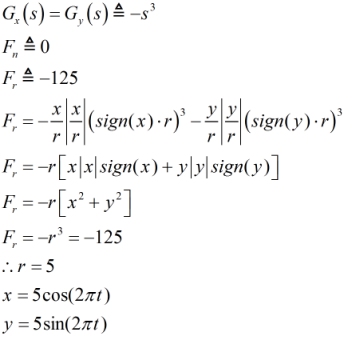
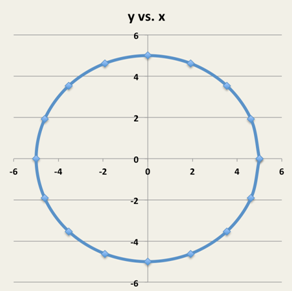
Example 2: Isotropic Bushing with No Damping and Constant Rotating ForceA constant tensile force of 125 units, rotating at 2*π radians/sec is imposed on the bushing. The force rotates in the X-Y plane of the J-Marker. The following equations show the deformations x and y as computed by the coupling formulation. The plot shows y vs. x is a circle as expected.
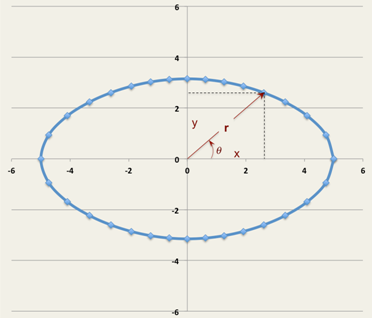
Example 3: Anisotropic Bushing with No Damping and Constant Rotating ForceA constant tensile force of 125 units, rotating at 2*π radians/sec, is imposed on the bushing. Rotation occurs in the X-Y plane of the J-Marker. The following equations show the deformations of x and y as computed by the coupling formulation. The plot shows that since the bushing is non-isotropic, the y vs. x plot is not a circle, but a smooth, elliptical, closed-curve as expected.
|