|
»Click here to display Table of Contents«
|

Brake Torque Controller |

|

|

|

|
|
Brake Torque Controller |
|
|
|

|
|
»Click here to display Table of Contents«
|
Brake Torque Controller |
|
|
|
|
|
Brake Torque Controller |
|
|
|
|
The Brake Torque Controller controls the deceleration of the vehicle during various braking maneuvers. This controller outputs a brake torque for each wheel, and is implemented in a single component force subroutine (SFOSUB). The brake torque is applied by a rotational single component force (torque) at each wheel. The torque acts between the suspension upright, or knuckle, and the wheel.
The Brake Torque Controller data can be accessed from the Project Browser by clicking on the Brake torque controller data form (located under the analysis).
| Note | The Forms panel containing the brake controller data is automatically displayed. |
Click the expansion button ![]() (located on the right side of the Forms panel) in order to display the Brake torque controller data dialog. This dialog allows you to to view/access all of the brake torque controller data in the current analysis.
(located on the right side of the Forms panel) in order to display the Brake torque controller data dialog. This dialog allows you to to view/access all of the brake torque controller data in the current analysis.
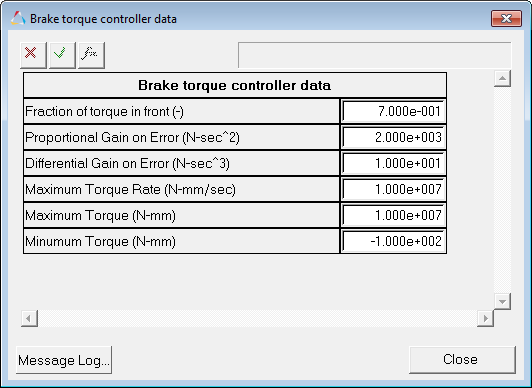
Brake torque controller parameters
A description of each brake torque controller parameter is provided below:
Fraction of |
The brake ratio between front and rear wheel. The calculated braking torque is divided in the given proportion and sent to the wheels. Typically, the fraction of torque in front is greater than 0.5 because the vertical loads on the front tires increase under braking while the vertical loads on the rear tires decrease. |
Proportional |
Determines the reaction to the current error in the velocity or acceleration. Large proportional gains give the controller a quick response, however they also create overshoot and may make the controller unstable. In contract, smaller proportional gains result in a controller which is less responsive. |
Differential |
Determines the reaction based on the rate-of-change of error. The rate-of-change of error is a prediction of future errors. Differential Gain on Error affects the oscillation and the overshoots of the desired velocity, or acceleration, and also affects the controller stability. If the Differential Gain on Error is increased, the oscillation in the velocity (or acceleration) will decrease; however too much differential gain will dampen the system and make the controller response sluggish. |
Maximum |
The change in brake torque (per unit time) output by the braking controller may not exceed this value. |
Maximum Torque |
The maximum value of torque the brake controller can deliver. |
Minimum Torque |
The minimum value of the torque the brake controller can deliver. |