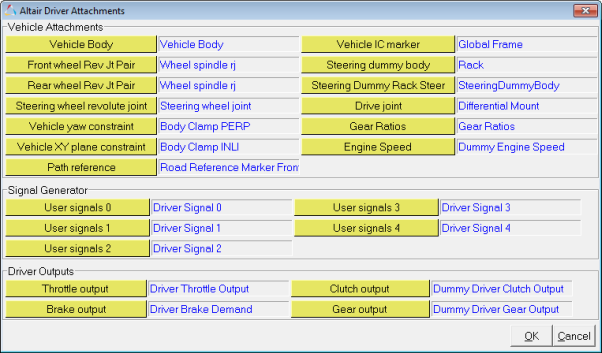
Attachments
|
Vehicle Body
|
Vehicle body
*Required to calculate velocities, accelerations and position of the vehicle.
|
Front hub joint pair
|
Joint pair of revolute joint between front hub and front spindle.
*Required to lock the wheel joints to converge to correct equilibrium position after static.
|
Rear hub joint pair
|
Joint pair of revolute joint between rear hub and rear spindle.
*Required to lock the wheel joints to converge to correct equilibrium position after static.
|
Vehicle yaw constraint
|
Perpendicular axes joint between vehicle body and the ground body.
|
Vehicle XY plane constraint
|
Inline joint between vehicle body and ground body. Aligning z axes of both ground and body. Thus, vehicle is bound to
*Above two joints are required to constraint the vehicle from yawing and translating along XY plane while solving static.
|
Vehicle IC reference marker
|
Marker with respect to whom the initial velocities are specified in the Altair driver file.
|
Road reference marker
|
Marker with respect to whom the user defined path, if any, is resolved.
|
Drive joint
|
Revolute joint between drive shaft and engine body fixed to the vehicle.
*Required to lock the differential during static.
|
Engine Speed
|
Solver variable from powertrain system that gives engine speed.
|
Steering Dummy Body
|
Dummy body (with negligible mass) in the steering system that connects to the Rack at Rack CG using an orientation joint and connects to rack housing using a translational joint at Rack CG.
|
Steering Dummy Rack Steer
|
Resolves to same dummy body for rack and pinion steering.
|
Gear Ratio Curve
|
Curve that informs driver about the gear ratios of the gear box if any.
X(Gear) Y(Ratio)
0 0.00 (oth gear is ignored)
1 4.7
2 3
|
User Signals
See the Signal Generator section for more details about the utility of these signals.
|
OL Signal 0
|
Driver signal 0 solver variable.
|
OL Signal 1
|
Driver signal 1 solver variable.
|
OL Signal 2
|
Driver signal 2 solver variable.
|
OL Signal 3
|
Driver signal 3 solver variable.
|
OL Signal 4
|
Driver signal 4 solver variable.
|
Driver Outputs
Driver overrides the solver signals attached here with the appropriate outputs.
Example: The throttle signal attached here would be overridden with the throttle output of the driver.
|
Throttle
|
Solver variable in vehicle model that driver uses to populate throttle output.
|
Brake
|
Solver variable in vehicle model that driver uses to populate brake output.
|
Clutch
|
Solver variable in vehicle model that driver uses to populate clutch output.
*If the vehicle model does not have clutch, this attachment can be resolved to any unused solver variable. Clutch output from the driver will be strictly 0 in this case.
|
Gear
|
Solver variable in vehicle model that driver uses to populate gear output.
*Similar to clutch, gear output should be resolved to any unused solver variable in case it is not needed.
|