It is highly recommended that the vehicle models used to driving analysis are built using the MDLLIB for the advanced driver. They cover all the dependencies of the driver on several vehicle systems. There are some API’s even at the solver level that are required by the driver.
This MDLLIB also provides an interface to model Brakes and Powertrain systems. These systems are required by the driver. Driver also requires a signal generator containing five solver variables. This signal generator is an interface to feed user defined signals to the driver.
Assembly Wizard Changes
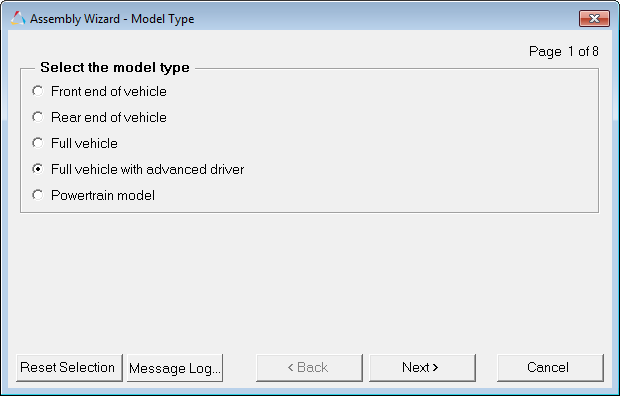
| 1. | Model type – new options “Full vehicle with advanced driver”. |
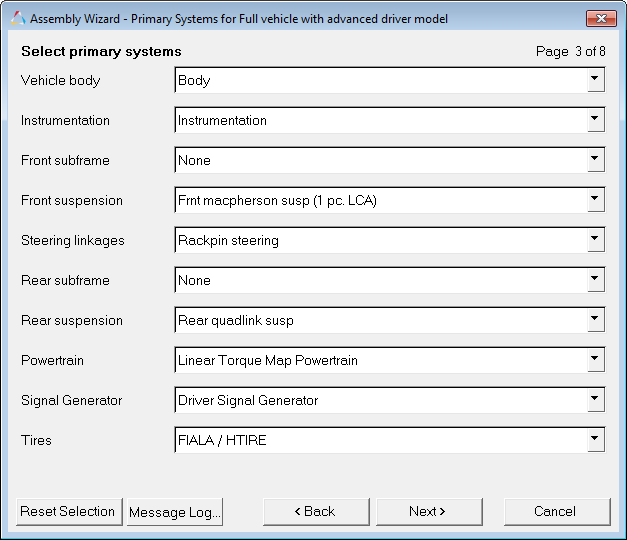
| 2. | Primary systems for full vehicle with advanced driver model. |
| I. | Manual transmission: IC Engine Friction Clutch Powertrain. |
| II. | Linear Torque Map Powertrain: Engine that applies torque directly proportional to driver throttle output. |
| b. | Driver Signal Generator: Five solver variables which provide and interface to link user defined signals to the driver. |
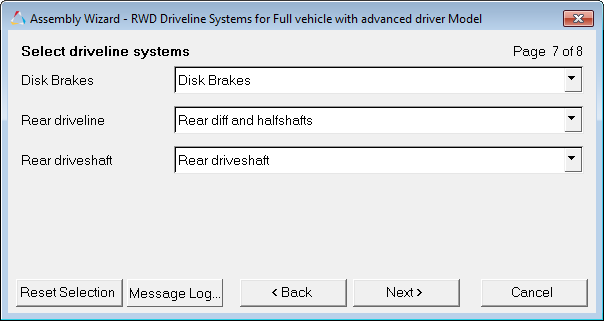
| 3. | Select a driveline system. |
| a. | Disk brakes: Apply braking torque on the wheel joint proportional to the driver brake output. |
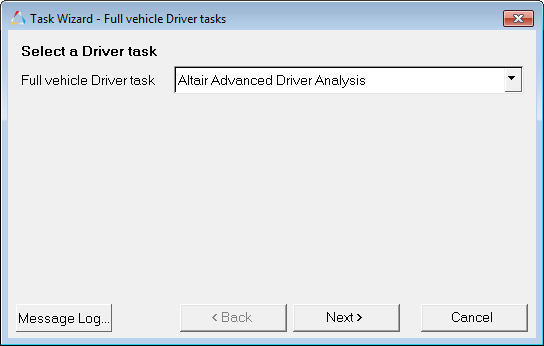
Task Wizard Changes
There should be only one option for the full vehicle with advanced driver.
| 1. | Altair Driver Analysis: At the end of the selection procedure and after the FINISH button is clicked, the Driver analysis with the driver panel should appear. |
Driver Outputs
Driver Outputs
|
F2: Steering Angle
F3: Throttle
F4: Brake
F6: Gear
F7: Clutch
|
Driver Inputs (1)
|
F2: Vehicle CG (x) wrt Gyro
F3: Vehicle CG (y) wrt Gyro
F4: Yaw angle wrt Gyro
F6: Roll Angle
F7: Pitch Angle
|
Driver Inputs (2)
|
F2: Longitudinal velocity wrt gyro
F3: Lateral velocity wrt gyro
F4: Yaw rate wrt gyro
F6: Roll rate
F7: Pitch rate
F8: Engine Speed
*Only in case of manual transmission
|
Driver Inputs (3)
|
F2: Longitudinal acceleration (wrt gyro)
F3: Lateral acceleration (wrt gyro)
|
Signal Channel (1)
|
F2: OL Signal 0
F3: OL Signal 1
F4: OL Signal 2
F6: OL Signal 3
F7: OL Signal 4
|
Driver Requests general
|
F2: Distance traveled
|
Driver Requests – Long Controller
|
F2: Demand Signal (Acceleration/Velocity)
F3: Control Signal (Acceleration/Velocity)
F4: Error (Demand – Control Signal) , e
F6: Error derivative , 
F7: Error integral, 
*Acceleration if type = follow acceleration
*Velocity if type = follow velocity
**Works only if Longitudinal Controller is closed loop type.
|
Driver Requests- Steer Controller
|
F2: Path x coordinate
F3: Path y coordinate
F4: Distance along centerline
F6: Laps completed
F7: Error (Demand – Control Signal)
F8: Reserved
**Works only if Steering Controller is closed loop type.
|
Driver Analysis Components
Typically it is not necessary to edit the analysis components, however advanced use may require editing these properties.





