|
»Click here to display Table of Contents«
|

CFAST |

|

|

|

|
|
CFAST |
|
|

|

|
|
»Click here to display Table of Contents«
|
CFAST |
|
|
|
|
|
CFAST |
|
|
|
|
Bulk Data Entry
CFAST – Fastener Element Connection
Description
Define a fastener with material orientation connecting two shell surfaces.
Format
(1) |
(2) |
(3) |
(4) |
(5) |
(6) |
(7) |
(8) |
(9) |
(10) |
CFAST |
EID |
PID |
CTYPE |
PIDA/ |
PIDB/ |
GS |
GA |
GB |
|
|
XS |
YS |
ZS |
|
|
|
|
|
|
|
|
Field |
Contents |
EID |
Unique element identification number. No default (Integer > 0) |
PID |
PFAST entry identification number. Default = EID (Integer > 0) |
CTYPE |
The type of connection between the patches. Either format connects up to 3 x 3 elements per patch (possibly more for triangular elements). For PROP, the connection of surface patch to surface patch is defined by specifying the property numbers of shells on side A and B, PIDA and PIDB, respectively. For ELEM, the connection of surface patch to surface patch is defined by specifying IDs of shells SHIDA and SHIDB, respectively. No default |
PIDA, PIDB |
Property identification numbers of PSHELL entries defining surface A and B, respectively. Required when CTYPE = PROP. (Integer > 0, PIDA ≠ PIDB) |
SHIDA, SHIDB |
Element identification numbers of shells defining fastener ends A and B, respectively. Required when CTYPE = ELEM. (Integer > 0, SHIDA ≠ SHIDB) |
GS |
Identification number of a grid point which defines the location of the connector. See comment 2. (Integer > 0) |
GA, GB |
Grid identification numbers of piercing points on surface A and surface B, respectively. See comment 3. (Integer > 0) |
XS, YS, ZS |
Coordinates of point that defines the location of the fastener in the basic coordinate system. It is an alternative way of specifying the location of GS. (Real) |
| 1. | CFAST defines a flexible connection between two shell surface patches. An internally-generated CBUSH element will be created automatically for a CFAST, and the end points of this bushing will be connected to the grids of corresponding shell elements. Then the stiffness, mass and structural damping of the CBUSH will be transferred to the corresponding shell grids. GS, GA and GB do not hold any independent DOF. See the figure below: |
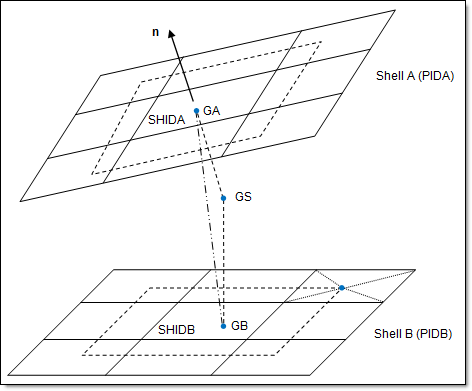
| 2. | A CFAST element connects Shell A and Shell B. An internal CBUSH is generated for the CFAST and supported by fictitious auxiliary points. Auxiliary points, in turn, are constrained by corresponding shell grids. (To have a clear view, only one of these kind of constraint relationships is shown with dotted lines). |
| 3. | The end points of the internally-generated CBUSH element are defined from GS, GA, and GB (not all are required). If GA or GB is not specified, they are generated from the normal projection of GS onto the surface patches. If GA and GB (or, GA only) are (is) specified, they take precedence over GS in defining the respective end points (If only GA is specified, then GA is used as a normal projection point (similar to GS) to generate GB on Shell B). Also, their locations will be corrected so that they lie on surface patch A and B, respectively. If neither GS nor GA is specified, (XS, YS, and ZS), in the basic coordinate system, must be specified. The length of the connector is the distance between projected points GA and GB. |
| 4. | The connections of the internally-generated bushing to surface patches A and B are defined in the following way: the axis GA-GB is used to define four pairs of auxiliary points GAHi, GBHi, i=1,4 that are located on patches A and B, respectively. The cross-section area of the resulting hexahedral is equivalent to the area of the connector, defined from diameter D on PFAST card. The connector stiffness matrix is first built by connecting the internally-generated bushing element to the auxiliary points, and then constraining them to supporting shell nodes using respective shape functions. Similarly, the mass of the fastener is divided by ½ to each side and then distributed via auxiliary points to supporting shell nodes. |
| 5. | Since the geometry for finding the correct projection could be various and complicated, sometimes the default projection algorithm may fail. However, the default projection rules and tolerances can be modified to some extent via the SWLDPRM card. |