| 1. | Control_Diff is quite versatile and has many different applications in modeling multi-body systems. User defined dynamic states are commonly used to create low pass filters, apply time lags to signals, model simple feedback loops and integrate signals. The signal may be used to define forces, used as independent variables for interpolating through splines or curves, used as input signals for generic control modeling elements, or used to define program output signals. |
The MotionSolve expressions and user-subroutines allow you to define fairly complex user defined dynamic states.
| 2. | The expression type is used when the algorithm defining the differential equation is simple enough to be expressed as a simple formula. In many situations, the dynamic state is governed by substantial logic and data manipulation. In such cases, it is preferable to use a programming language to define the value of a Control_Diff. A user defined subroutine, allows you to accomplish this. For more information on defining a user subroutine for the Control_Diff model element, please refer to the DIFSUB documentation. |
| 3. | Ordinary differential equations may be explicit or implicit. |
An explicit differential equation has the form:
 ; y is the variable being defined, u are state dependent inputs (obtained from the rest of the system) and t is the independent variable. ; y is the variable being defined, u are state dependent inputs (obtained from the rest of the system) and t is the independent variable.
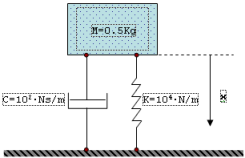
Here is an example of an explicit, 2nd order differential equation:
 (no state dependent input u) (no state dependent input u)
You may recognize it as the equation of motion for a simple pendulum.
An implicit differential equation has the form:
 ; y is the variable being defined, u are state dependent inputs (obtained from the rest of the system) and t is the independent variable. ; y is the variable being defined, u are state dependent inputs (obtained from the rest of the system) and t is the independent variable.
Here is an example of an implicit, 1st order differential equation:
 (no state dependent input u) (no state dependent input u)
This equation cannot be symbolically transformed to define  explicitly. For implicit differential equations, an initial guess for explicitly. For implicit differential equations, an initial guess for  is also required. is also required.
The key differences between the two representations are summarized below:
| • | In the explicit case, the derivative of the dynamic state is explicitly defined. The expression defines the derivative of the user defined state  . . |
| • | In the implicit case, the derivative has to be solved for. The expression defines the residue of the differential equation,  . . |
| • | An important requirement for implicitly defined ordinary differential equations is that the partial derivative,  , must always be non-zero. This is satisfied for explicit differential equations if they were expressed in an implicit manner. , must always be non-zero. This is satisfied for explicit differential equations if they were expressed in an implicit manner. |
| 4. | To define implicit differential equations, you need to access both the value of the dynamic state associated with a CONTROL_DIFF and its time derivative. |
| • | The function DIF(ID) allows you to access the value of the dynamic state. |
| • | The function DIF1(ID) allows you to access the time derivative of the dynamic state. |
| 5. | The equation defining the time derivative of the dynamic state (explicitly or implicitly) should be smooth for efficient solution. Lack of smoothness may be inadvertently introduced into the equations the following ways. |
| • | By experimental data (sampled as Splines). The data may have a lot of noise. |
| • | Logic in a user subroutine or a function expression that may introduce kinks or even discontinuities in the function if not careful. |
| 6. | If you wish to introduce a set of differential equations into the model, use the Control_StateEqn modeling element to accomplish this. Unlike Control_Diff, Control_StateEqn can handle arrays of differential equations. |
| 7. | The behavior of the dynamic state associated with a Control_Diff object during static and quasistatic solutions is governed by the attribute, is_static_hold. |
is_static_hold = "TRUE"
If the solution is done at time t=0, the state is kept fixed at the value specified by ic. If the solution is being done after a dynamic analysis, then the value is kept fixed at the last value obtained from a dynamic simulation. The equation defining the Control_Diff is replaced with the following equation:
 , where y* is a constant. , where y* is a constant.
Note that when the value of the dynamic state is kept fixed, the time derivative no longer is zero, since the inputs u changes. This may lead to transients in the solution, if a dynamic solution were to be subsequently performed.
is_static_hold = "FALSE"
The state is not kept constant, but is allowed to change as the state of the entire system changes during the solution process. Here is how this is accomplished:
| • | For static and quasi-static solutions, the derivative of the dynamic state is set to zero. This converts the Control_Diff to an algebraic equation for these two analyses. |
Explicit differential equations become:

Implicit differential equations become:

During the equilibrium solution, the inputs u change, as the system changes its configuration to meet the equilibrium conditions. The above equations are solved to compute y for a given value of u.
This mechanism ensures that the time derivative of the dynamic state is zero at the end of the static or quasi-static solution, and ensures a smooth subsequent dynamic analysis.
|