The response quantity, g, is calculated from the displacements as:

The sensitivity of this response with respect to the design variable x, or the gradient of the response, is:
Two approaches to sensitivity analysis, the direct and adjoint variable method, are possible. Given the equation of motion:

and its derivative with respect to design variable x,
one can calculate the sensitivity of the displacement vector u as:
Using this equation, the largest cost in the calculation of the response gradient is the forward-backward substitution required for the calculation of the derivative of the displacement vector with respect to the design variable. This is called the direct method. One forward-backward substitution is required for each design variable.
If constraints are active in more than one load case, and the load is a function of the design variable (say body force or pressure loads for shape optimization), then the set of forward-backward substitutions must be performed for each active load case. If the loads are not a function of the design variables, but there are active load cases with multiple boundary conditions, then the set of forward-backward substitutions must be performed for each active boundary condition.
For the adjoint variable method of sensitivity analysis, the vector (adjoint variable) a is introduced, which is calculated as:

Then the derivative of the constraint can be calculated as:
When the adjoint variable method for sensitivity analysis is used, a single forward-backward substitution is needed for each retained constraint. This forward-backward substitution is needed to calculate the vector a.
There are typically a small number of design variables in shape and size optimization (say 5 to 50) and a large number of constraints. The large number of constraints comes from stress constraints. If there are 20,000 elements, each with a single stress constraint, and 10 load cases, there are a total of 200,000 possible stress constraints.
There are typically a large number of design variables in topology optimization (between 1 and 3 per element) and a small number of constraints. Because stress constraints are not usually considered in topology optimization, it makes sense that the adjoint variable method of sensitivity analysis be used for topology optimization (in order to reduce computational costs).
For shape and sizing optimization, it is often beneficial to use the direct method for sensitivity analysis. However, in some cases, when there are a large number of design variables and a small number of constraints, the adjoint variable method should be used. For example, in a topography optimization, the number of constraints that gradients need to be calculated for can be reduced using constraint screening. With constraint screening, constraints that are not close to being violated are ignored. Only constraints that are violated, or nearly violated, are retained. Also, if there are many stress constraints that are retained in a small region of the structure, say at a stress concentration, only a few of the most critical need to be retained.
The sensitivities of responses with respect to design variables can be exported to an Excel spreadsheet (OUTPUT, MSSENS) or plotted in HyperGraph (OUTPUT, HGSENS). For contouring in HyperView, the sensitivities of topology, free-sizing and gauge design variables can be exported to H3D format (OUTPUT, H3DTOPOL and OUTPUT, H3DGAUGE, respectively). Sensitivity output in ASCII format for topology and free-sizing variables can be requested through OUTPUT, ASCSENS.
DOPTPRM, DESMAX, 0 can be used in conjunction with sensitivity output requests (OUTPUT, H3DTOPOL, and so on) to output sensitivities for a model without running the optimization. Only one analysis run is performed and the sensitivity calculations are completed.
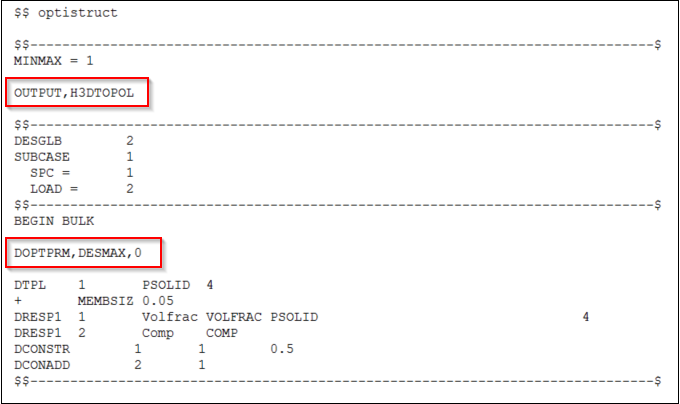
Example Input file showing how DOPTPRM, DESMAX,0 and OUTPUT, H3DTOPOL can be used in Sensitivity Analysis.
The Excel spreadsheet allows the modification of design variables and then computes approximated responses. This can be used to make design studies without running OptiStruct again.
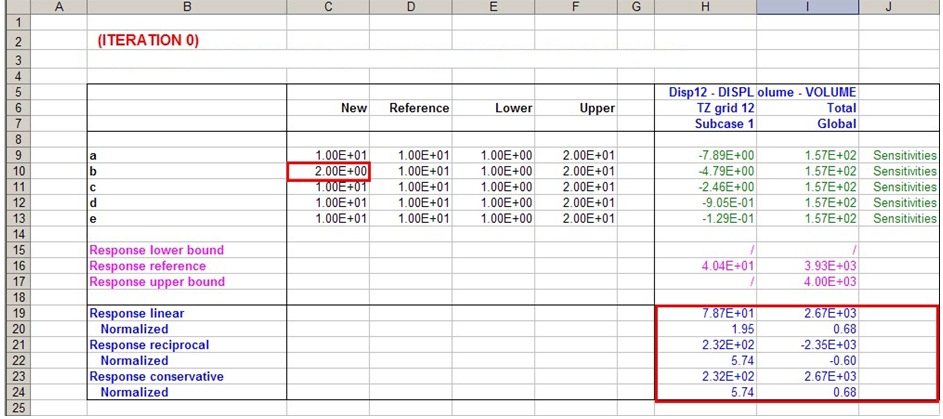
Example spreadsheet output showing that modification of field C10 yields approximate results in the lower right of the spreadsheet, identified by a border surround here.
|