Definition
Interface type 6 is used to simulate contact between two rigid bodies. This interface is similar to interface type 3, except for the stiffness. The relationship between the contact force and the penetration is provided by a user-defined function. This interface is used particularly in vehicle occupant simulations, for example: knee bolsters. The main limitation of this interface is that surface 1 must be part of one rigid body, and also for surface 2. Moreover, both surfaces must be oriented so that normals are facing each others.
The stiffness used corresponds to the curve Force versus Penetration input by you. The instantaneous interface stiffness is the slope of the input curve at the given penetration; therefore the time step can be affected since the interface stiffness is used to compute a stable time step:

Where, M is the min (Mass of the first rigid body and Mass of the second rigid body), and K is the slope of Force vs Penetration curve.
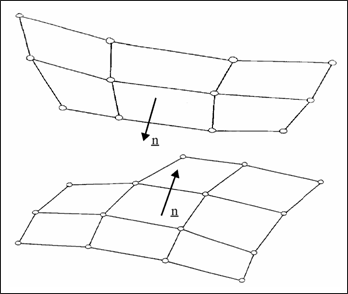
Fig. 5.9: Interface type 6 - normal orientation





