|
»Click here to display Table of Contents«
|

/INTER/TYPE6 |

|

|

|

|
|
/INTER/TYPE6 |
|
|

|

|
|
»Click here to display Table of Contents«
|
/INTER/TYPE6 |
|
|
|
|
|
/INTER/TYPE6 |
|
|
|
|
Block Format Keyword
/INTER/TYPE6 - Contact between two rigid bodies with tabulated input of the contact force
Description
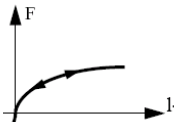
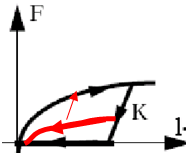
This interface is used to simulate contact between two rigid bodies with tabulated input of the contact force. It works similar to interface TYPE3. Contact force between the bodies can be input as a function of maximal penetration. The interface also allows you to input a force function for unloading.
The following conditions should be fulfilled for this interface:
| • | the segments of two contact surface must face each other (example: the surface normals must be oriented from one surface to the other) |
| • | the interface only works with segments connected to solid or shell elements; two contact surface must not share the same node (must be part of 2 different rigid bodies) |
| • | user-defined interface stiffness can reduce the time step |
(1) |
(2) |
(3) |
(4) |
(5) |
(6) |
(7) |
(8) |
(9) |
(10) |
/INTER/TYPE6/inter_ID/unit_ID |
|||||||||
inter_title |
|||||||||
surf_ID1 |
surf_ID2 |
|
|
|
|
|
|
|
|
Sfric |
Fric |
Gap |
Tstart |
Tstop |
|||||
|
IRS |
IRM |
Inacti |
fct_IDff |
fct_IDfv |
Ascalef |
Ascalev |
||
fct_IDId |
Iform |
Ascalex |
FscaleId |
Icor |
|
|
|
||
fct_IDul |
|
Stiff |
Fscaleul |
|
|
|
|
||
Visc |
fct_IDdv |
fct_IDdf |
Fscalev |
|
|
|
|
||
|
Interface TYPE6 in User's Guide
Penalty Method in User's Guide