|
»Click here to display Table of Contents«
|

NLRGAP |

|

|

|

|
|
NLRGAP |
|
|

|

|
|
»Click here to display Table of Contents«
|
NLRGAP |
|
|
|
|
|
NLRGAP |
|
|
|
|
Bulk Data Entry
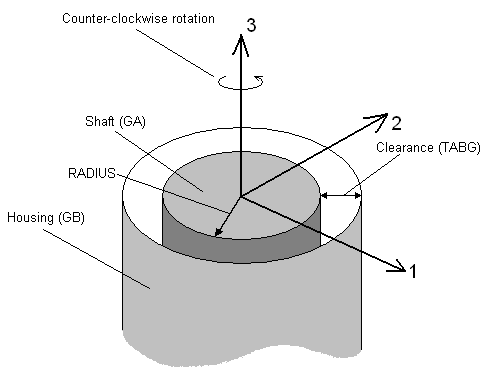
NLRGAP – Nonlinear Load Proportional to Gap
Description
Defines a nonlinear radial (circular) gap for direct transient response analysis.
Format
(1) |
(2) |
(3) |
(4) |
(5) |
(6) |
(7) |
(8) |
(9) |
(10) |
NLRGAP |
SID |
GA |
GB |
PLANE |
TABK |
TABG |
TABU |
RADIUS |
|
|
Field |
Contents |
||||
SID |
Nonlinear load set identification number. No default (Integer > 0) |
||||
GA |
Inner grid for radial gap (shaft). No default (Integer > 0) |
||||
GB |
Outer grid for radial gap (housing). No default (Integer > 0) |
||||
PLANE |
Radial gap orientation plane. Default = XY (XY, YZ or ZX) |
||||
TABK |
Table ID defining either:
If the integer is positive, it is the ID of a TABLED1 entry defining time vs. gap stiffness. If the integer is negative, the absolute value of the integer is the ID of a TABLED1 entry defining gap penetration vs. gap force. No default (Integer > 0) |
||||
TABG |
Table ID for radial gap clearance as a function of time. No default (Integer > 0) |
||||
TABU |
Table ID for radial coefficient of friction as a function of time. No default (Integer > 0) |
||||
RADIUS |
Shaft radius. Used only for the computation of friction induced torque. Default = 0.0 (Real > 0.0) |
| 1. | Nonlinear radial gap must be selected by the Subcase Information data selector NONLINEAR. |
| 2. | Multiple NLRGAP entries with the same SID are allowed. |
| 3. | The NLRGAP is not an element, but a nonlinear load similar to the NOLIN1, NOLIN2, NOLIN3 and NOLIN4 entries. It computes the relative displacements of GA and GB in the selected plane and applies appropriate nonlinear loads to simulate the radial contact. |
| 4. | The degrees-of-freedom in the XY, YZ and ZX planes (depending on the PLANE defined) of GA and GB must be members of the solution set. This means that they must not be dependent degrees-of-freedom and the must not have SPCs applied to them. If RADIUS is > 0.0, then the in-plane rotation degree-of-freedom must also be in the solution set. |
| 5. | The NLRGAP is limited to use in direct transient response analysis. |
| 6. | The XY, YZ and ZX planes are relative to the displacement coordinate systems of GA and GB. |
| 7. | GA and GB must both be grid points, they must both be coincident, and they must have parallel displacement coordinate systems. If any of these conditions are not met, an error termination will occur. |
| 8. | A positive coefficient of friction is consistent with a counter-clockwise shaft rotation. |
| 9. | The time step algorithm in transient solution sequences may loose unconditional stability when this load entry is used. In most practical cases, the time step size chosen to reach a certain accuracy is below the stability limit. It is recommended to decrease the time step if results diverge. |
| 10. | Forces due to TABK and TABU at GA and GB are only present when the gap is closed. A moment is applied only when the gap is closed and RADIUS > 0.0. |
See Also: